|






 |  |

| Aeronautica | Comunicatii | Drept | Informatica | Nutritie | Sociologie |
| Tehnica mecanica |
Retele calculatoare
|
|
Qdidactic » stiinta & tehnica » informatica » retele calculatoare SISTEME SCADA - elementele sistemelor SCADA |
SISTEME SCADA - elementele sistemelor SCADA
SISTEME SCADA. DESCRIERE GENERALA
1.1. Generalitati
SCADA (Supervisory Control And Data Acquisition) este o tehnologie care permite utilizatorului sa preleveze date de la diferite terminale si sa trimita instructiuni acelor teminale. Un sistem SCADA permite utilizatorului, situat intr-un post central, sa supervizeze si sa comande un numar mare de controlere de sistem aflate la distante mari.
Controlul la distanta inseamna elaborarea deciziilor pentru controlul evolutiei unui proces fizic intr-un loc aflat la distanta (mare) de procesul respective.
Controlul automat inseamna corectia proceselor fizice fara interventia umana. Nu toate sistemele SCADA sunt sisteme de control automat; primele variante ca si multe din cele actuale indeplinesc doar functiile de achizitie automata de date si de control la distanta. Finalizarea achizitiei de date printr-o decizie de control se face doar in urma optiunii operatorului. SCADA achizitioneaza date de pe arii foarte extinse sau din puncte foarte numeroase, integrandu-le intr-o forma interpretabila de operatorul uman, si ofera, uneori, solutii posibile (prestabilite prin program), lasand la latitudinea operatorului alegerea solutiei optime sau a modului de actionare (decizia finala). Operatorul uman ia decizii in baza mai multor considerente, nu intodeauna posibil de programat sau de reactualizat in timp util in memoria MTU. Sistemele SCADA au doar rolul de consiliere.
Cresterea calitatii si sigurantei in functionare a retelelor de comunicatie ca si marirea vitezei si puterii de calcul a computerelor in jurul carora se realizeaza MTU au incurajat evolutia funciilor sistemelor SCADA catre controlul automat, inclusive in domenii complexe precum generarea energiei electrice, sisteme de distributie °i dispecerizare, etc. Controlul sistemelor electrice de distributie se realizeaza prin inchiderea sau deschiderea unor intreruptoare iar viteza de raspuns la modificarile de sarcina pe linii trebuie sa fie maxima. Semnale uzuale: alarme, indicatori de stare, marimi analogice si cumulative.
1.1. Elementele sistemelor SCADA
Un sistem SCADA are 3 componente: operatorul uman, MTU (Master Terminal Unit) si RTU (Remote Terminal Unit).
Operatorul ocupa pozitia centrala si acceseaza sistemul prin intermediul unei interfete operator de tip display cu un set minimal de ferestre de anunt si un avertizor sonor. Interfata operator este interpusa intre acesta si MTU (controlerul sistemului). MTU include si perifericele grafice (imprimanta, plotter,etc) si cele care asigura interfata-operator (display, tastatura, mouse, iesire de sunet, etc).
Comunicatia intre MTU si RTU se face prin cablu electric, optic, linie telefonica sau radio, sau combinatii intre acestea. Un MTU poate controla sute de RTU. Ratele de transfer depasesc 2400 bps numai pentru sistemele SCADA dedicate controlului sistemelor electrice de distributie. MTU poate comunica si prin retea locala (LAN), cu alte MTU.
RTU reprezinta de fapt partea complicata a sistemului SCADA, deoarece la nivelul sau sunt analizate starile circuitelor si dispozitivelor supervizate, sunt luate decizii logice si sunt activate servomecanismele sau comenzile elementelor de executie apoi sunt elaborate mesaje catre MTU pentru informarea acestuia despre indeplinirea comenzii primite. De aceea, majoritatea RTU au structura si tehnologia foarte asemanatoare calculatoarelor.
Legaturile intre RTU si dispozitivele periferice (senzori, servomecanisme, dipozitive de actionare, contacte-martor, etc.) se fac de obicei cu cabluri. RTU include, de regula, sursa de alimentare a dispozitivelor comandate, de regula un UPS (sursa independenta). MTU scaneaza relativ rar fiecare RTU; RTU scaneaza mult mai des fiecare din dispozitivele periferice pe care le controleaza.
Elementul distinctiv al SCADA fata telemetrie este bidirectionalitatea: se pot monitoriza procesele fizice supravegheate (RTU>MTU) si se poate actiona asupra evolutiei acestora (MTU>RTU) prin supervizare.
Sisteme de timp real. Notiunea de sistem de timp real are semnificatia unui sistem de control care poate elabora decizii si actiona asupra sistemului controlat cu o intarziere ale carei efecte nu sunt masurabile sau nu afecteaza functionarea acestuia. Nu intodeauna este necesar ca semnalele de alarma sa apara imediat (pe o linie de intreruperi, de exemplu); sunt situatii in care timpul de raspuns al SCADA este insignifiant fata de timpul de raspuns al echipelor de interventie. In aceasta situatie, rata de scanare a RTU de catre MTU nu trebuie sa fie prea mare (odata pe minut sau la 10 minute este suficient).
Comunicatia intre elementele sistemelor SCADA se face dupa metoda master-slave, in care una din unitati este master, find singura care poate initia comunicatia. Alte unitati slave pot initia comunicatia doar daca masterul le permite sau le da instructiuni in acest sens. Chestionarea succesiva a RTU de catre MTU se numeste scanare. Determinarea intervalului de scanare se face in functie de numarul RTU, de cantitatea de date care trebuie transmise pe durata unei conversatii si de viteza de variatie a semnalelor de intrare specifice proceselor controlate. Uneori succesiunea de scanare se modifica, astfel incat RTU care supevizeaza semnale rapide sa fie scanate mai des decat celelalte.
Viteza de transmisie a datelor este un alt factor determinant al ratei de scanare, dar eficienta comunicatiei este o functie neliniara de rata de transfer a datelor. Dublarea ratei de transfer nu conduce la dublarea eficientei, deoarece transmiterea unui mesaj include timpul de adresare, timpul necesar detectiei si corectiei erorilor (si alte elemente ale protocolului de comunicatie) care nu pot fi excluse desi nu fac parte din mesajul propriu-zis. De aceea eficienta comunicatiei pe linii telefonice dedicate nu depaseste 70%, prin radio 40%.
Controlul la distanta. Restrictii. In virtutea legilor lui Murphy, niciodata nu se controleaza de la distanta functiile vitale ale sistemelor supervizate. Functiile care pot fi controlate de sistemele SCADA sunt: protectia si masurarea.
Instrumentatia de protectie. Toate procesele care prin defecte locale pot conduce la deranjamentul unui beneficiar, defectarea echipamentelor sau poluarea mediului trebuie echipate cu sisteme de protectie. Aceste sisteme pot fi manuale (monitor si operator) sau automate pentru sisteme cu evolutie rapida. Nici sistemele de control nu sunt perfecte, suportand diferite defecte intempestive.
Proiectarea sistemelor de protectie se face in spiritul a trei axiome:
Acces prioritar la dispozitivele de executie fata de sistemul de control permanent;
Absenta elementelor comune cu sistemul de control normal;
Maxima simplitate.
Includerea SCADA in sistemele de distributie tine seama de ultimele doua considerente. Paralelismul sistemelor de protectie cu sistemele SCADA nu este insa foarte sever, cele doua putand avea in comun senzorii si elementele de executie, ca si MTU si RTU. Rezolvarea situatiilor complexe nu impune neaparat interventia unor sisteme complicate.
Ideea simplitatii nu vine in contradictie cu proiectele SCADA
|
deoarece acestea sunt in general suficient de simple pentru a putea fi utilizate pe functii de protectie.
Generatoarele si sistemele de distributie pot fi protejate, maximizand
in acelasi timp continuitatea serviciilor, prin monitorizarea intregii retele si telecomanda dispozitivelor de actionare. O restrictie se impune totusi: senzorii, logica, si actionarea proprii sistemelor de distributie locale nu trebuie sa depinda de sistemele SCADA. Defectele cu risc mare se evita prin instalarea sistemelor de protectie locale, prioritare fata de sistemele SCADA.
Masurarile pentru tarifare sunt facute prin interiorul sistemelor
SCADA la nivelul MTU, dar valorile locale se memoreaza si la nivelul RTU un interval de timp oarecare (zile,luni) in functie de memoria disponibila si nivelul de defalcare (pe ore sau zile).
1.2. Comunicatia
In sistemele SCADA comunicatia are un rol vital. In rolurile in care nu se poate realiza un canal de comunicatie, sistemele SCADA nu pot fi utilizate. Toate datele transferate intre MTU si RTU sunt in forma numerica (binara). De aceea, transmiterea unor comenzi de ajustare presupune conversia analog-numerica a marimilor de control, transmiterea lor in forma numerica si reconstituirea nivelelor de comanda prin conversie numeric-analogica la nivelul RTU. Comunicatia MTU-RTU se face pe linii seriale , deoarece caile de comunicatie sunt lungi sau foarte lungi.(figura ).
Ordinea de transmisie este MSB . ..LSB sau LSB . MSB in functie de protocolul de comunicatie adoptat. In termeni de comunicatii, MTU si RTU sunt DTE (Data Terminal Equipment), fiecare avand posibilitatea de a genera un semnal continand informatia care trebuie transmisa si de a decodifica informatia din semnalul receptionat. In fig. de mai jos este reprezentat principiul de comunicatie. Modem-urile sunt DCE (Data Comunication Equipment) si au rol de interfata intre DTE (care le contine) si mediul de comunicatie.
DTE mediu DTE

fig. Comunicatia MTU-RTU
Modemul este elemental hard esential. Ca purtatoare se foloseste
unda
sinusoidala, care nu este afectata de distorsiuni de faza.
Modularea se poate face in frecventa, in amplitudine sau in
faza. AM presupune inmultirea amplitudinii
purtatoarei cu amplitudinea datelor. FM inseamna amplitudine
Mediul de comunicatie utilizat de sistemele SCADA este
determinat de rata de transfer necesara si de cost. Pentru rate mari de transfer se utilizeaza cabluri cu fibre optice, microunde sau sisteme UHF mai sofisticate. Se pot inchiria linii telefonice, mai ales pentru rate de 300 . 4800 bauds, dar si transceiver-ele radio UHF ieftine pot indeplini aceasta functie.
Transmisiile in cablu pot fi afectate de perturbatii electromagnetice din liniile de distributie de mare/medie putere situate in paralel, sau de activitatea solara. Cablurile cu fibre optice devin competitive ce cele din Cu, avand aceeasi tehnologiede instalare. Comunicatia prin radio in system duplex este cea mai complexa si cea mai utilizata in sistemele SCADA.
Sistemele simplex sunt unidirectionale si utilizeaza un singur canal. Daca nu este necesar transferul bidirectional simultan, tot pe un singur canal pot lucra doua sisteme simplex in sensuri diferite, alcatuind un system half-duplex. Un sistem full-duplex are doua canale, permitand vehicularea simultana a informatiilor in ambele sensuri.
Un cuplet de comunicatie (MTU + RTU) lucrand pe o linie half-duplex functioneaza dupa un protocol elementar: MTU emite catre un anume RTU, apoi isi opreste emitatorul si porneste receptorul. RTU receptioneaza, opreste receptorul si isi porneste emitatorul, semnaland catre MTU ca este gata de primirea mesajelor, s.a.m.d Timpii de comutare a emitatoarelor si receptoarelor pot fi chiar mai lungi decat duratele mesajelor propriu-zise; ameliorarea vitezei de comunicatie nu necesita neaparat mirea ratei de transfer ci imbnatatirea performantelor temporale le echipamentelor de comunicatie. De aceea sistemele full-duplex sunt mult mai avantajoase: MTU transmite continuu pe un canal, directionand mesajele catre un anume RTU precedate de codul de identificare al RTU destinatar. Pe canalul celalat, RTU adresat transmite raspunsul, dupa care elibereaza canalul (prin oprirea emitatorului propriu) permitand si altui RTU sa raspunda. Bineanteles ca varianta cea mai eficienta ar fi utilizarea cate unui canal full-duplex intre MTU si fiecare RTU, dar este scump si ar ocupa un domeniu prea larg de frecvente.
Utilizarea unei frecvente implica alocarea unei benzi centrate pe acea frecventa, de latime corespunzatoare ratei de transfer (frecventei modulatoare): latime abenzii este circa 1 x rata de transfer pentru AM, 2 x rata pentru FSK si 3 x rata - pentru FM, la care se adauga cam 1 khz pentru separarea neta a canalelor. De exemplu transmiterea mesajelor cu rata de 1200 baud necesita cam 3 kHz latime de banda.
UHF (300. . . 3000 mHz) se pot obtine relativ usor si au o propagare cvasirectilinie, de aceea majoritatea sistemelor SCADA le utilizeaza. Alocarea canalelor radio se face prin reglementari internationale si este destul de restrictiva. Cu cat frecventa este maimare, cu atat undele electromagneticeau un comportament mai apropiat de cel al luminii, de aceea intre untatile SCADA care comunica prin UHF sau microunde trebuie sa exite o linie de vizibilitate directa. Zgomotul solar poate interfera cu semnalele transmise pri UHF sau microunde. Alte influente care trebuie compensate: temperature, variatiile tensiunii de alimentare, intemperiile, etc. Cele mai potrivite pentru sisteme SCADA de mari dimensiuni sunt transmisiile prin sateliti geosincroni.
1.3. RTU
RTU este elementul sistemului SCADA care gestioneaza achizitia datelor si memoreaza valorile masurate (sau valori sintetice) pana cand este chestionat asupra lor de MTU. In plus, RTU transmite comenzi de la MTU catre elementele de executie (prelucrate sau nu; de exemplu MTU da comanda de modificare a pozitiei unui element mobil cu o valoare oarecare, iar RTU elaboreaza semnalele necesare comenzii motorului pas-cu-pas care efectueaza acea deplasare). Formatul usual de comunicatie etse RS-232, iar semnalele asociate unui RTU sunt prezentate in fig. .
Monitorizarea semnalelor discrete,
corespunzatoare unor stari logice associate unor elemente ale
sistemelor controlate (de exemplu atingerea unor praguri) sau ale
protectiilor (pentru semnalizarea alarmelor) presupune asignarea
corespunzatore a bitilor dintr-unul sau mai multi octeti,
analiza fiind facuta practice instantaneu, prin compararea
contiunutului registrelor respective cu valorile standard, la nivelul
unitatii centrale (CPU) din RTU.
Fig. Semnale caracteristice pentru RTU
Monitorizarea semnalelor analogice presupune utilizarea ADC si analizarea cuvantului binar asociat valorii mimii continue convertite.
RTU moderne sunt de fapt microcomputere echipate cu interfete adecvate (A/D, D/A pentru interfatare cu procesele fizice supervizate si modem pentru interfata cu linia de comunicatie). Schema bloc a unui RTU este reprezentata in fig. .
Decodificarea mesajelor se face dupa un protocol de comunicatie chiar de microprocesorul sistemului, prin rularea unui program denumit driver de protocol. Starea obisnuita a RTU este cea de ascultare.
Controlul discret presupune comenzi tip inchis/deschis si poate fi facut prin mesaje mai scurte, un octet putand controla starea a 8 elemente de tip releu (pornit/oprit).
Controlul analogic este dedicate elementelor cu mai multe stari intermediare(valve, regulatoare de diferite tipuri) sinecesita cel putin un octet de control (max. 256 stari, inclusive capetele de scala). Rareori se utilizeaza 2 octeti de control (max. 65536 stari). Continutul octetilor de control este transpus intr-o marime analogica prin conversie D/A cu DAC asociat sau nu cu regulatoare PID.
Controlul in impulsuri este folosit mai rar, pentru comanda motoarelor pas-cu pas. Doi octeti dedicati sunt testati succesiv bitcu bit (primul este bit de sens), rezultatul fiind trimis direct la motor.
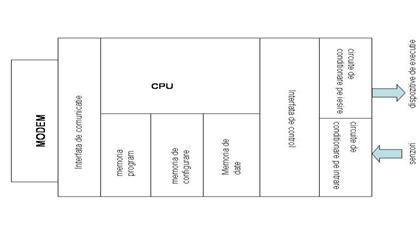
Fig Arhitectura interna a RTU
1.4. MTU
MTU si RTU schimba informatii prin acelaai moediu si cu acelasi protocol. Ca urmare, interfata de comunicatie din MTU are aceeasi structura, pana la identitate, cu cea din RTU. Dferenta notabila este ca RTU nu poate (prin program) sa initieze conversatia. Programele interne de comunicatie pot fi apelate si de operator, dar mai mult de 99% sunt apelate automat, de programul principal. Comunicatia MTU cu operatorul se face prin monitor video si imprimanta, cu interfete si dupa protocoale identice celor utilizate la computere. In sistemele foarte extinse, MTU are rol de slave fata de computerele centrale, transferand date care urmeaza sa fie prelucrate la nivelul superior.
Proiectarea MTU incepe cu introducerea tuturor datelor caracteristice ale tuturor senzorilor si actuatoarelor, si descrierea ierarhica a procesului, pe baza carora MTU sa poata lua decizii logice si informa operatorul uman in orice moment asupra starii tuturor elementelor sistemului. Procedeul se numeste configurare. La majoritatea MTU programele de configurare ce introducerea datelor in tabele sau ferestre corespunzatoare (mult mai multe decat la configurarea unui PC). MTU trebuie initiat cu adresele tuturor RTU pe care le are in subordine, modul de comunicatie cu fiecare dintre acestea, terminalele fiecar.ui RTU(I/O, etc).
MTU stocheaza datele utilizate pe clase si categorii. La proiectare, se definesc dimensiunile spatiilor de memorie necesare pentru istoria tuturor evenimentelor care urmeaza sa fie memorate in vederea detectarii cauzelor si localizarii defectelor. Studiul evolutiei unui system pe o perioada mai mare de timp(zile, saptamani, luni) poate fi facut prin apelarea bazelor de date prin retele locale LAN), fara a supradimensiona memoria MTU. Sistemele SCADA nu au insa rol statistic, ci de intretinere a functiilor vitale ale unui proces, cu facilitate de adjustare,protectie si monitorizare a acestuia.
Datele sunt memorate la nivelul MTU pentru o istorie scurta,necesara unei decizii, dupa care sunt sterse si inlocuite cu altele noi. Modelul frecvent utilizat in sistemele moderne este cel cu fereastra temporala itineranta, in care memoria de date este accesata in tehnica FIFO.
1.5. Aplicatii
Viteza mare cu care RTU scaneaza senzorii face ca intarzierile specifice comunicatiei RTU- senzori sa fie neglijabile; principala intarziere se produce datorita ratelor reduse de comunicatie si a protocoalelor extinse intre RTU si MTU.Uneori intazierea este acceptabila , alteori nu.Aplicatiile care vizeaza sistemele de generare si distributie a energiei electricenu pot functiona cu viteze de scanare mi mici de 1 scanare la 1 . .5 secunde.
Utilizarea proiectelor SCADA pentru masurarea in scop tarifar risica doua probleme: precizia si securitatea masuratorilor. Prima cade de regula pe planul doi.prima cade de regula pe planul doi. Marea majoritate a masurarilor se fac cu traductoare simple carora li se aplica formule simple de corectie.Daca algoritmul care include toate aceste corectii se implementeaza in punctele de masurare, toate acestea trebuie sa aiba o putere de calcul crescuta Un paleativ este utilizarea unui calculator mai puternic in MTU.
Solutia este utilizarea calculelor in afara MTU.
Multe marimi masurate trebuie integrate in timp pentru a capata o semnificatie utila(de exemplu puterea active sau reactiva). Pentru a obtine marimile cu semnificatie valorica (energi) puterea trebuie integrate in timp. Cu cat rata de esantionare a puterilor este mai mare, cu atat integrarea va fi mai precisa.ratele de scanare specifice MTU nu satisfac in nici un caznecsitatile de precizie pentru tarifare. Masurarile cu acest scop se fac la nivelul RTU, care au capacitate de calcul suficienta pentru calcule complexe aferente catorva puncte de masurare. Dezavantajul efectuarii calculelor in RTU fata de utilizarea unui totalizator consta in modalitatea diferita de schimbare a valorilor valorilor (coeficientilor): prin programare soft- la totalizator, sau prin arderea unui EPROM-la RTU.
Ordinea de scanare a RTU de catre MTU este precizata intr-un program simplu si usor de modificat in urma configurarii initiale.In functie de procesul fizic supervizat,se pot efectua diferite tipuri de scanari.In regim normal,MTU chestioneaza fiecare RTU, asteptand raspunsul fiecaruia. Pentru un control concertat si riguros al mai multor puncte, MTU trimite comenzi si asteapta doar confirmarea de primire de la fiecare RTU, urmand ca acesta sa actioneze independent.
Daca viteza de raspuns este critica, MTU scaneaza toate RTU intr-o sucesiune rapida, transmitand comenzile fara a mai astepta confirmari de primire sau raspunsuri de la RTU, pe care le va receptiona la o scanare ulterioara.Eseul repetat de stabilire a liniei de comunicatie intre MTU si un RTU este semnalat de obicei ca situatie de alarmare.
| Contact |- ia legatura cu noi -| | |
| Adauga document |- pune-ti documente online -| | |
| Termeni & conditii de utilizare |- politica de cookies si de confidentialitate -| | |
| Copyright © |- 2026 - Toate drepturile rezervate -| |
|
|
||||||||||||||||||||||||
|
||||||||||||||||||||||||
|
||||||||||||||||||||||||
Lucrari pe aceeasi tema | ||||||||||||||||||||||||
|
| ||||||||||||||||||||||||
|
||||||||||||||||||||||||
|
|
||||||||||||||||||||||||