|






 |  |

| Aeronautica | Comunicatii | Drept | Informatica | Nutritie | Sociologie |
| Tehnica mecanica |
Tehnica mecanica
|
|
Qdidactic » stiinta & tehnica » tehnica mecanica Cum Lucreaza GPS-ul |
Cum Lucreaza GPS-ul
Cum Lucreaza GPS-ul
Exista mai multe metode pentru a putea obtine o pozitie folosind GPS-ul. Metoda aleasa depinde de exactitatea necesitata de utilizator si de tipul de receptor GPS disponibil. Pe scurt, tehnica aceasta poate fi impartita in trei clase de baza.
Corectarea pozitiei diferential se stie ca DGPS da o acuratete a masuratorilor cuprinsa intre 0,5-5m. Este folosita in navigatia din apropierea coastelor, colectarea de date GIS, lucrari de pricizie in agricultura.
Deplasarea autonoma folosind un singur receptor. Este folosita de catre calatori/ excursionisti, navele care sunt in largul marii si de catre armata. Exactitatea pozitiei este calculata cu o eroare mai mica de 100m pentru civili si 20m. pentru militari
Pozitia fazei diferentiale da o eroare de la 0,5/20m. Este folosita intr-o multime de aplicatii topografice.
1 Navigarea Simpla
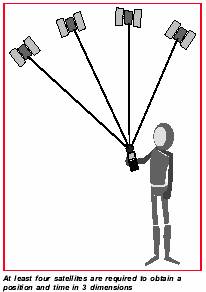
1.1 Raza de raspandire a satelitilor
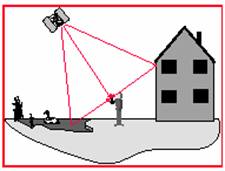
Aceasta este cea mai simpla tehnica folosita de catre receptorii GPS pentru a da unui utilizator in mod instantaneu o pozitie, zenitul si/sau timpul exact. Eroarea datelor obtinute este mai mica de 100m.(de obicei intre 30-50m.) pentru utilizatorii civili si de 5-15m. pentru militari. Explicarea acestor diferente intre datele pentru civili si cele pentru militari vor fi explicate ceva mai pe larg in paginile urmatoare. Receptorii folositi pentru acest tip de operatie sunt de obicei mici, putand fi usor de manuit si de transportat, cu un pret mai mic.

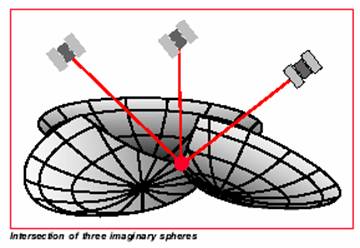
Toate pozitionarile GPS au la baza masurarea distantei dintre sateliti si receptorul GPS de pe pamant. Distanta fata de fiecare satelit poate fi determinata de catre fiecare receptor GPS. Ideea de baza este cea a intersectiei, care este folosita de multi topografi in munca lor. Daca se cunoaste distanta fata de trei puncte (care au legatura cu pozitia utilizatorului) acesta poate sa-si determine pozitia in functie de cele trei puncte. Din valoarea distantei data de un satelit ne putem da seama ca pozitia receptorului trebuie sa fie undeva pe suprafata unei sfere imaginare care porneste de la satelit. Prin intersectarea a trei astfel de sfere imaginare poate fi determinata pozitia receptorului.
Problema ce se iveste consta in faptul ca pot fi determinate doar pseudorange (distanta primara) si momentul in care semnalul este captat de catre receptor.
Asadar, sunt patru necunoscute care trebuie determinate: pozitia (x,y,z) si timpul de transmitere (calatorie) al semnalului. Receptarea a 4 sateliti da nastere la 4 ecuatii care pot fi rezolvate permitand determinarea acestor necunoscute.
1.2 Calcularea distantei fata de satelit
Pentru a putea determina distanta fata de fiecare satelit este folosita una dintre legile miscarii elaborata de catre I. Newton.
Distanta= viteza x timp
De exemplu se poate calcula distanta pe care a parcurso un tren, daca se cunoaste viteza si timpul in care s-a deplasat cu acea viteza.
La GPS receptorul v-a calcula distanta dintre el si satelit.
Viteza - reprezinta viteza de propagare a semnalului radio. Undele radio se propaga cu viteza luminii (290. 000 Km/s - 186. 000 mile/s).
Timpul - reprezinta timpul in care semnalul radio ajunge de la satelit la receptorul GPS. Acesta este putin mai greu de calculat, deoarece necesita sa stim cu exactitate cand a parasit semnalul radio satelitul si cand a ajuns la receptor.
Calcularea timpului
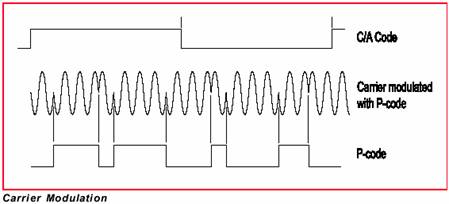
Semnalul satelitului are 2 coduri modulate pe el, codul C/A si codul P. Codul C/A este dat de timpul masurat de un ceas atomic foarte precis. Si receptorul contine un ceas care este folosit pentru a genera un cod care sa se potriveasca cu codul C/A. Receptorul GPS mai poate sa "potriveasca" sau sa coreleze codul primit de la satelit cu codul generat de receptor.
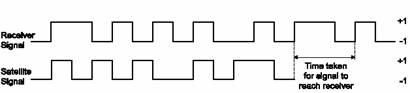
Codul C/A este un cod digital care este "pseudo random" (pseudo aleatoare) sau pare a fi "random"(aleator). De fapt nu este "random" si repeta 100 de timpi pe secunda.
Astfel este calculat timpul pe care semnalul radio il face de la satelit la receptorul GPS.
1.3 Sursele erorilor
Pana acum stim ca pozitia data de GPS este foarte exacta si fara erori, insa exista cateva surse care genereaza erori, care afecteaza pozitionarea generata de GPS cu cativa metri sau cativa zeci de metri . Aceste surse care genereaza erorile sunt:
1. intarzieriledatorate ionosferei / atmosferei
2. erorile ceasului satelitului si a receptorului
3. Caile multiple
4. Atenuarea preciziei
5. Disponibilitatea selectiva (S/A)
6. Anti Spoofing (A-S)
1. Intarzierile ionosferice si atmosferice
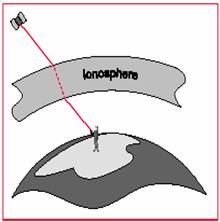
In timp ce semnalul emis de catre satelit strabate ionosfera, poate fi incetinit, efectul fiind similar cu refractia luminii. Aceste inconveniente atmosferice pot duce la erori in calcularea distantei, prin afectarea vitezei semnalului (lumina are o viteza constatnta doar prin vid).
Ionosfera nu intarzie in mod constant propagarea semnalului. Exista mai multi factori care influenteaza totalul incovenientelor (disturbarilor, intarzierilor) cauzate de catre ionosfera.
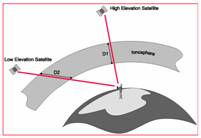
a. Inaltimea satelitilor Semnalele pe care le emit satelitii aflati la o inaltime mai mica vor fi afectate mai puternic decat cele emise de catre satelitii situati la o inaltime mai mare. Acest fapt se datoreaza distantei mai mari pe care semnalul o strabate prin ionosfera.
b. Soarele afecteaza densitatea ionosferei In timpul noptii se inregistreaza o mica influenta din partea ionosferei. In timpul zilei, soarele stimuleaza efectul ionosferei si incetineste propagarea semnalului. Gradul in care creste densitatea ionosferei variaza in functie de ciclurile solare (activitatea petelor solare).
Activitatea petelor solare atinge punctul maxim aproximativ odata la 11 ani. Mai putem adauga ca sporadic mai pot avea loc explozii solare care si ele afecteaza ionosfera.
Erorile cauzate de catre ionosfera pot fi diminuate folosind una dintre urmatoarele metode:
- prima metoda prevede stabilirea unei valori medii a efectului diminuarii vitezei luminii pe care-l cauzeaza ionosfera. Acest factor de corectie este apoi introdus in calculul distantei . Oricum, aceasta metoda se bazeaza pe o medie (valoare conventionala) si cu siguranta conditiile in care este calculata nu se repeta tot timpul. Ca urmare, aceasta metoda reprezinta o solutie optima pentru diminuarea erorilor cauzate de catre ionosfera.
- a doua metoda sugereaza folosirea receptorilor GPS cu frecventa duala. Astfel de receptori vor masura frecventele L1 si L2 ale semnalului GPS. Este cunoscut faptul ca atunci cand un semnal radio strabate ionosfera este incetinit cu o viteza invers proportionala cu frecveta lui. Asadar, daca timpul de sosire ale celor doua smnale va fi comparat, se poate face o estimare precisa a intarzierii. Nu uitati ca acest lucru este posibil numai cu receptori GPS cu frecventa duala. Cea mai mare parte a receptorilor (pentru deplasari) sunt prevazuti cu o singura frecventa.
c. Vaporii de apa din atmosfera afecteaza si ei semnalul GPS
Acest efect ilustrat prin afectarea pozitiei, poate fi redus prin folosirea modelelor din atmosfera.
2. Erorile de ceas ale satelitului si receptorului
|
Cu toate ca ceasurile satelitilor sunt foarte exacte (cu o erore de 3 nanosecunde) pot uneori sa devieze usor, afectand astfel exactitatea pozitiei. Departamentul de stat al apararii SUA supravegheaza ceasurile folosind segmente de control (despre care s-a vorbit) si astfel poate corecta orice deviere.
Erori multipath
Acestea au loc atunci cand antena receptorului este situata in apropierea unei mari suprafete reflectante, cum ar fi un lac sau o cladire. Semnalul satelitului nu va merge drept spre antena ci intai va atinge obiectele din vecinatate si va fi reflectat spre antena avand astfel o masuratoare falsa.
Efectul mutipath poate fi redus prin folosirea unor antene GPS speciale care au un "groun plane" (disc metalic circular cu un diametru de 50 cm care impiedica semnalele de mica inaltime sa ajunga la antena.

Pentru o mai mare exactitate, recomandam folosirea unei antene choke-ring (tip bobina). O astfel de antena are 4 sau5 inele concentrice dispuse in jurul antenei, care preiau orice semnal indirect.
Multipath afecteaza doar masuratorile topografice de inalta precizie. Receptorii portativi simpli (pentru deplasare) nu necesita astfel de tehnici.
4. Alternarea preciziei (Dilution of precision - DOP)
DOP este o masura/prevedere a fortei/tariei geometriei satelitului si se afla in legatura cu plasarea si pozitia satelitilor. DOP poate sa mareasca efectul erorilor provenite din dispunerea satelitilor.
Principiul este bine ilustrat de cele ce urmeaza:
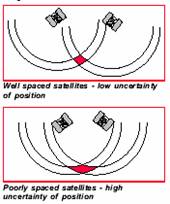
Distanta fata de sateliti este afectata de erorile provenite din dispunerea lor. Cand satelitii sunt bine plasati, pozitia poate fi determinata ca fiind in zona punctata (intunecata) din diagrama iar marja de eroare este mica.
Cand satelitii sunt apropiati zona intunecata creste ca intindere, crescand astfel si nesiguranta in ceea ce priveste pozitia.
Diferitele tipuri de DOP pot fi calculate in fuctie de dimensiune
VDOP - atenuarea pe verticala a pozitiei da o eroare in directie verticala.
HDOP - atenuarea preciziei pe orizontala da o eroare pe orizontala.
PDOP - atenuarea pozitionala a preciziei.da eroare pozitie (pozitionare) 3D.
GDOP - atenuarea geometrica a preciziei da eroarea pozitiei (pozitionarii) in 3D+ timpul.
Cel mai util DOP cunoscut este GDOP, care este o combinatie a tuturor factorilor. Unii receptorii insa calculeaza PDOP sau HDOP, care nu includ si componenta temporala (de timp).
Cea mai buna cale de a minimaliza efectul GDOP este aceea de a recepta cat mai multi sateliti posibili. Nu uitati insa ca semnalele emise de catre satelitii aflati la o mai mica inaltime sunt in general alterate intr-o mai mare masura de catre cele mai multe surse de eroare.
In general, cand lucrati cu un GPS este recomandat sa luati in considerare satelitii care se afla la 15 grade deasupra orizontului. Pozitia cea mai exacta se va obtine in general cand GDOP este scazut (de obicei 8 sau chiar mai putin).
1.4 De ce au o acuratete mai mare receptorii GPS militari
5. Disponibilitatea selectiva (S/A)
Disponibilitatea selectiva este un proces aplicat de catre Departamentul Apararii al SUA asupra semnalului GPS. Acesta prevede influentarea precizieie datelor furnizate de catre GPS pentru civili sau pentru forte straine ostile printr-un proces complex care altereaza usor ceasul si timpul satelitilor. In plus, traictoria pe care satelitii trebuie sa o aiba este difuzata ca fiind usor diferita de cea pe care o au in realitate. Rezultatul final este o degradare a exactitatii pozitiei.
Este bine de stiut ca S/A afecteaza utilizatorii civili care folosesc un singur receptor GPS pentru a obtine o pozitie singulara (autonoma). Utilizatorii de sisteme diferentiale (multiple) nu sunt afectati semnificativ de catre S/A.
Dupa cate stim se estimeaza ca S/A sa fie decuplat cel tarziu pana in 2006.
6. Anti-Spoofing (A-S
A-S se aseamana cu S/A in aceea ca incearca sa interzica accesul civililor sau fortelor ostile la partea semnalului GPS ce contine codul P parte a semnalului GPS si deci forteaza folosirea unui cod C/A care are aplicat un cod S/A.
A-S cupleaza codul P intr-un semnal denumit codul Y. Doar utilizatorii ce dispun de receptori GPS militari (SUA si aliatii ei) pot sa descripteze codul Y.
Receptorii militari sunt mai exacti deoarece ei nu folosesc codul C/A pentru a calcula timpul in care semnalul ajunge la receptor. Ei folosesc codul P.
Codul P este modelat pe frecventa de 10.23Hz. Codul C/A este modelat pe frecventa de 1.023 Hz. Calculele sunt mult mai exacte (se lucreaza cu o viteza de 10 ori mai mare decat in cazul C/A).
Codul P este supus programului Anti Spoofing. Acesta inseamna ca doar armata, echipata cu receptori GPS speciali poate citi acest cod P (cunoscut si sub numele de cod Y).
Din acest motiv, utilizatorii GPS-urilor pentru armata, obtin de obicei o pozitie cu o eroare de aproximativ 5m. In timp ce civilii, ce folosesc receptoare GPS (pentru ei) vor obtine date cu o eroare de 15/100m.
2.Pozitii corectate in mod diferentiat (DGPS)
Mare parte a erorilor ce afecteaza masuratorile efectuate de sateliti pot fi eliminate complet sau cel putin semnificativ reduse utilizand tehnicile de masurare diferentiata.
DGPS permite utilizatorului civil sa mareasca exactitatea pozitiei, de fapt sa scada marja de eroare a pozitionarii de la 100m la 2-3m sau chiar mai putin, facand astfel posibile si folositoare aplicatii cu caracter civil.
2.1 Receptorul de referinta
2.2 Receptorul Rover 2.3 Alte detalii
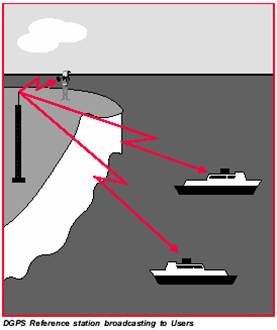
Antena receptorului de referinta este montata intr-un punct masurat anterior si ale carui coordonate sunt cunoscute. Receptorul care este plasat in acest punct este cunoscut sub numele de receptor de referinta sau statie de baza.
Receptorul se porneste si incepe sa depisteze satelitii. Poate calcula o pozitie autonoma folosind tehnicile mentionate la 1.
Din cauza ca este intr-un punct cunoscut receptorul de referinta poate sa estimeze foarte precis care ar trebui sa fie distantele fata de sateliti.
Astfel, receptorul de referinta poate sa rezolve problema diferentei dintre valorile calculate si masurate ale distantelor fata de sateliti.
Aceste diferente sunt denumite corectii.
Receptorul de referinta este de obicei atasat unui sir de legaturi radio care sunt folosite pentru a raspandi aceste corectii.
Acest receptor se afla la celalat capat al corectiilor. El contine o legatura de date radio care-i permite sa perceapa corecturile difuzate de catre receptorul de referinta.
Receptorul Rover mai calculeaza si distantele la sateliti dupa cum am vazut la 1. Apoi aplica corectura pe care o primeste de la receptorul de referinta. Acesta ii permite sa calculeze o pozitie cu mult mai exacta decat cea determinata de catre masuratorile care nu au corectii.
Folosind aceasta tehnica, toate sursele de erori enuntate la 1. sunt minimalizate, obtinand astfel cea mai exacta pozitie.
Este bine de stiut ca mai multi receptori Rover pot primi corecturi de la un singur receptor de referinta.
DGPS-ul a fost explicat mai inainte. In realitate este putin mai complex decat atat.
O parte importanta o constituie legatura radio. Exista mai multe tipuri de legaturi radio care pot sa emita pe diferite arii de acoperire si frecvente. Performantele lor depind de o suma de factori, incluzand:
Frecventa radio
Puterea radiou-lui
Tipul si insusirile (imbunatatirile) antenei radio
Pozitia antenei
Canalele receptorului GPS si transmitatorii radio puternici au stabilit sa emita pe o frecventa de siguranta "maritima doar". Acestia sunt cunoscuti sub denumirea de Beacon Transmitters. Utilizatorii acestuia (in special nave de transport in apele din apropierea coastelor) au nevoie doar sa detina un receptor Rover care sa poata receptiona semnalul Beacon. Astfel de sisteme au fost activate in regiunea de coasta a multor state.
In afara de Beacon Systems mai exista si alte sisteme care sa aiba acoperire pe o zona destul de larga si care sunt folosite (gestionate) de catre companii private. Exista de asemenea sisteme propuse de guverne precum Federal Aviation Authorit'y bazat pe Wide Area Augmentation System (WAAS) in SUA, sistemul European Space Agenc'y (ESA) propus de guvernul japonez.
Este folosit de obicei un format standard pentru transmitea datelor radio GPS. Acesta este numit formatul RTCM. Aceasta pozitie (stands) pentru Radio Technical Commission Maritime Service, o industrie sponsorizata de organizatii nonprofit. Acest format este de obicei cel mai folosit in intreaga lume.
3 Faza diferentiala si
Rezolutia ambiguitatii 1 Faza Purtatoarei, C/A si codul P
Faza diferentiala este utilizata in special in topografie si in domeniile invecinate pentru a obtine o pozifaza diferentiala este utilizata in special in topografie si in domenii le invecinate pentru a obtine o pozitionare cat mai exacta cu o eroare de 5/50mm. Tehnica folosita este diferita fata de ceea ce am prezentat anterior si implica multa analiza statistica.Este o tehnica diferentiata care prevede ca intotdeauna sa fie folositi simultan cel putin doi receptorii GPS. Acest lucru constituie una din asemanarile cu metoda de corectare a codurilor diferentiale de la 2.Receptorul de referinta va fi intotdeauna pozitionat intr-un punct fix sau al carui coordonate sunt cunoscute. Celalalt sau ceilalti receptori pot fi miscati si pozi a codurilor diferentiale de la 2.Receptorul de referinta va fi intotdeauna pozitionat intr-un punct fix sau al carui coordonate sunt cunoscute. Celalalt sau ceilalti receptori pot fi miscati si pozitionati oriunde. Ei sunt denumiti receptori Roveri (mobili). Vor fi calculate liniile de baza de la receptorul de referinta si receptor rover.Tehnica de baza este aceeasi cu cele mentionate anterior si masoara distantele fata de 4 sateliti si calculeaza o pozitie din aceste 4 arii.
Marea diferenta intervine in modul in care acestea sunt calculate.
In acest moment, este necesar sa definim diversele componente ale semnalului GPS.
Faza Purtatoarei. Semnalul de baza al undelor L1 si L2 este creat de satelit.Faza purtatoarei L1 este generata pe 1575.42MHz, purtatoarea L2 generata pe 1227.6MHz.
C/A code. Codul de achizitie grosier . Modulat pe purtatoarea L1 la 1.023MHz .
P-code. The precise code. Modulated on the L1 and L2 carriers at 10.23 MHz.
Refer also to the diagram in section 2.1.
What does modulation mean ?
The carrier waves are designed to carry the binary C/A and P-codes in a process
known as modulation. Modulation means the codes are superimposed on the
carrier wave. The codes are binary codes. This means they can only have the values
1 or -1. Each time the value changes, there is a change in the phase of the carrier.
2 De ce foloseste faza tatoarei?
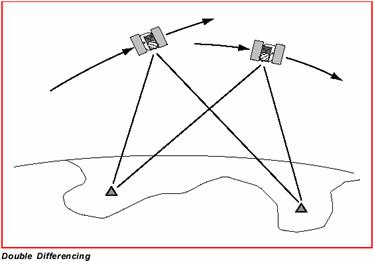
3 Diferentiale duble
Faza purtatoarei este folosita deoarece poate da o mai buna precizie la masuratorile cu sateliti care folosesc codul P si codul C/A. Faza undei purtatoarei L1 are o lungime de unda de 19.4 cm . Daca ai putea sa masori numarul de lungimi de unda (partea intreaga si partea fractionara) dintre satelit si receptor, vei gasi o distanta foarte precisa.
Majoritatea erorilor intampinate cand determinam pozitii autonome, provin de la nepotrivirile intre ceasurile satelitului si receptorului. O modalitate de rezolvare a acestei erori consta intr-o tehnica cunoscuta cum este: Diferentiale Duble .
Daca doua receptoare GPS fac inregistrari spre doua grupe diferite de sateliti, erorile ceasurilor satelitare si din GPS-uri sunt compensate, indepartand orice sursa de eroare duce la imbunatatirea ecuatiilor
4 Ambiguity and Ambiguity
Resolution
Dupa indepartarea erorii ceasurilor prin diferentiale duble, poate fi determinat numarul intreg de lungimi de unda plus partea fractionara. Problema in aceasta determinare consta in determinarea numarului de lungimi de lungimi de unda intregi catre fiecare satelit observat. Solutia este ambigua. Procesarea statistica poate rezolva aceasta problema si determina cea mai probabila solutie .
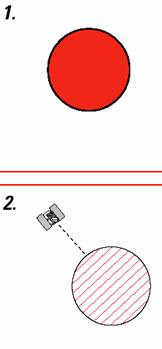
Explicatia de mai jos este o schita a procesului de determinare a rezolutiei ambiguitatii . Multi factori complicati nu sunt prezentati in aceasta explicatie, dar prezinta o imagine utila .
Codul diferentialei poate fi utilizat pentru a obtine o pozitie aproximativa. Rezultatul are o eroare undeva in acest cerc .
Capatul undei de la un singur satelit este atat innauntrul cat si in afara cercului.
Punctul precis are o gresala undeva in liniile afisate de aceste capete de unde in interiorul cercului.
Continuare Cand al doilea satelit este observat, un al
doilea set de capete de unde or linii defaza este creat. Punctul se afla undeva intr-una din aceste
intersectii .
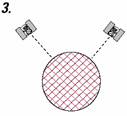

Odata cu modificarile constelatiei satelitilor Cea mai probabila solutie se va afla in jurul unui punct .
4. Aspecte geodezice

De cand GPS-ul a devenit foarte popular ca si intrumentele de topografie si navigatie , topografii si navigatorii solicita informatii de baza referitoare la cum se leaga GPS-ul de sistemul standard de pe harti .
O eroare des intalnita in GPS este rezultata din proasta intelegere a "masuratorilor reletive".

4.1. Introducere

Determinand pozitia cu GPS-ul realizam o baza fundsmentala geodezica - determinarea pozitiei absolute cu precizie uniforma la toate punctele de pe suprafata terestra. Utilizand metodele clasice geodezice , determinarea pozitiei este mereu relativa la punctul de start , cu precizia depinzad de distanta fata de punctul de start. Deci GPS, ofera un avantaj esmnificativ fata de metodele conventionale.
Principiile geogezice stau la baza GPS, si altfel spus, GPS a devenit un instrument foarte important in geodezie:
1. Intretinerea si restabilirea retelei geodezice tridimensionale globale de pe pamant , verificarea deplasarilor in timp ale retelei datorate placilor tectonice
2. Masurarea si afisarea fenomenelor geodinamice (miscarea polilor, miscari crustale, etc).
Determinarea gravitatii pamantului, incluzand variatiile temporale.
4.1. Sistemul de coordonate GPS
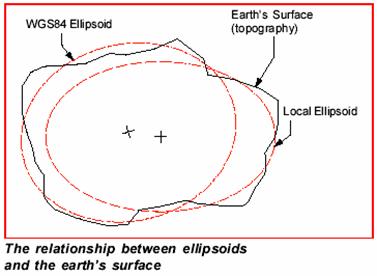
Forma Pamantului poate aparea ca o sfera uniforma cand este vazuta din spatiu, in realitate este departe de a fi uniform.
In realitate GPS-ul trebuie sa dea coordonate la orice punct de pe suprafata pamantului, folosind un sistem de coordonate geodezic bazat pe elipsoid . Un elipsoid este o sfera turtita .
Elipsoidul este ales ca fiind cea mai buna aproximare a formei pamantului. Acest elipsoid nu este o suprafata fizica dar este definita matematic.
 De fapt sunt foarte multi elipsoizi sau forme
matematice care sa defineasca pamantul, dupa cum vor fi prezentate mai tarziu.
De fapt sunt foarte multi elipsoizi sau forme
matematice care sa defineasca pamantul, dupa cum vor fi prezentate mai tarziu.
Elipsoibul folosir de GPS-uri este WGS84 (World Geodetic System 1984).
Un punct de pe suprafata pamantului (aceasta nu este forma elipsoidului), poate fi definit prin Latitudine, Longitudine si inaltimea pe elipsoid.
O metoda elternativa pentru definirea unui punct este folosirea sistemului de coordonate cartezian, cu axele X,Y,Z cu origine in centrul sferoidului.
Aceasta metoda este folosita in primul rand de GPS pentru localizarea unui punct in spatiu.
4. Sistemul de coordonate local
Ca si coordonatele GPS, coordonatele locale sau coordonatele folosite in unele tari sunt bazate pe elipsoizi locali,
De obicei, aceste coordonate sunt proiectate pe o suprafata plana sa rezulte coordonate rectangulare.
Elipsoidele sunt folosite la majoritatea sistemelor de coordonate locale, acolo unde au fost folosite prima data, in urma cu multi ani, inaintea aparitiei tehnologiei spatiale.
Acesti elipsoizi tind sa se potriveasca mai bine pe zona de interes, dar nu pot fi folositi pe alte zone de pe pamant.
Acum, fiecare tara are un sistem de referintabazat pe un elipsoid local
Cand folosim GPS-ul, coordonatele calculate se afla pe elipsoidul WGS84. Coordonatele existente sunt de obicei intr-un sistem de coordonate local si de accea coordonatele GPS trebuie transformate in sistemul local
4.4. Probleme la cote
Prin natura lui GPS-ul afecteaza cota masuratorilor.
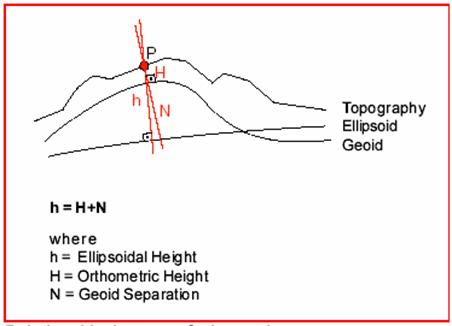
Toate cotele date cu GPS-ul sunt referite la elipsoidul WGS84; acestea sunt cunoscute ca cote elipsoidale .
Cotele existente sunt de obicei cote ortometrice masurate relativ la media nivelul marii .
Media nivelului marii corespunde geoidului . Geoidul poate fi definit ca suprafata echipotentiala, forta gravittiei este constanta in orice punct de pe geoid.
Geoidul este un model neregulat si nu corespunde niciunui elipsoid.
Densitatea pamantului, totusi poate evea efect asupra geoidului, provocand cresteri ale densitatii unor regiuni si scaderi ale altora.
Relatia dintre geoid, elipsoid si suprafata pamantului, este prezentata in graficul de mai jos.
Hartile utilizeaza cote ortometrice (relative la geoid),astfel ca majoritatea utilizatorilor de GPS au nevoie de cote ortometrice.
Aceasta problema este rezolvata prin utilizarea unui model geoidal pentru conversia cotelor elipsoidale in cote ortometrice . In zonele aproximativ plane geoidul poate fi considerat constant. In asemenea zone, se utilizeaza o anumita transformare care sa creeze un model al cotelor unde cotele geoidale pot fi interpolate in datele existente.
4.5. Transformari
Scopul acstor transformari este de a trece coordonatele dintr-un sistem intr-altul .
Sunt alocate mai multe transformari diferite . Cea pe care o folosesti va depinde de de rezultatele pe care le doresti.
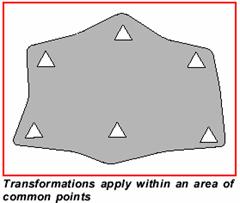
In primul rand, coordonatele trebuie sa fie in ambele sisteme (WGS84 si sistemul local) pentru cel putin 3 puncte , de preferabil 4 puncte, comune.
Mai multe puncte incluse in transformare, rezulta o calitate mai buna a transformarii si se verifica erorile .
Punctele comune sunt obtinute prin masurarea lor cu GPS, unde coordonatele si cotele ortometrice sunt sunt cunoscute in sistemul local (puncte de control existente).
Parametri de transformare pot fi atunci calculati utilizand una din transformatile apropiate.
It is important to note that the transformation
will only apply to points in the
area bounded by the common points.
Points outside of this area should not be
transformed using the calculated
parameters but should form part of a
new transformation area.
| Contact |- ia legatura cu noi -| | |
| Adauga document |- pune-ti documente online -| | |
| Termeni & conditii de utilizare |- politica de cookies si de confidentialitate -| | |
| Copyright © |- 2025 - Toate drepturile rezervate -| |
|
|
|||
|
|||
|
|||
Lucrari pe aceeasi tema | |||
|
| |||
|
|||
|
|
|||