|






 |  |

| Afaceri | Agricultura | Comunicare | Constructii | Contabilitate | Contracte |
| Economie | Finante | Management | Marketing | Transporturi |
Navigatie
|
|
Qdidactic » bani & cariera » transporturi » navigatie GIROSCOPUL - proprietatile giroscopului liber, aplicatii ale giroscopului |
GIROSCOPUL - proprietatile giroscopului liber, aplicatii ale giroscopului
Giroscopul
Giroscopul este elementul principal la un mare numar de aparate moderne, care servesc in scopurile navigatiei.
Se numeste giroscop corpul simetric care se roteste cu o viteza mare in jurul axei sale de simetrie si este suspendat astfel incat aceasta axa poate ocupa orice pozitie in spatiu.
Termenul de giroscop provine de la cuvintele grecesti: ghiuris, care inseamna rotatie si scopein care inseamna a urmari.
In tehnica, giroscopul reprezinta un volant greu a carui masa este distribuita uniform in raport cu axa de simetrie si care se roteste cu o viteza de 6000 30000rot/min. Axa in jurul careia se roteste giroscopul se numeste axa proprie de rotatie sau axa principala. Aceasta axa este perpendiculara pa planul giroscopului si trece prin centrul lui de greutate.
Pentru ca axa principala sa poata lua o directie dorita in spatiu, giroscopul se monteaza intr-o suspensie cardanica (fig.1).
Definirea pozitiei giroscopului se face in raport cu 3 axe de coordonate rectangulare (perpendiculare una pe alta: X-X, Z-Z si Y-Y), care se aleg in asa fel incat punctul lor de intersectie sa coincida cu centrul acestuia (0).
|
|
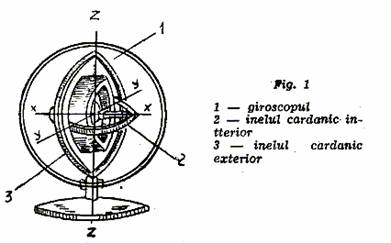
Axa X-X se considera directia de orientare a axei de rotatie a giroscopului. Pe ea se afla 2 lagare ale inelului cardanic interior (2), in care se monteaza capetele axului giroscopului.
La randul sau inelul cardanic interior are 2 suporti care se monteaza in 2 lagare dispuse pe inelul cardanic exterior (3). In acest fel inelul cardanic interior se poate roti in jurul axei Y-Y.
Inelul cardanic exterior are si el 2 suporti care se monteaza in 2 lagare ale unui cadru vertical, avand deci posibilitatea de rotire in jurul axei Z-Z.
Acest tip de giroscop denumit giroscop de laborator, poseda 3 grade de libertate, adica 3 coordonate independente care determina pozitia lui in spatiu.
Prin numarul de grade de libertate se intelege in mecanica numarul de marimi independente care detrmina pozitia corpurilor. In cazul giroscopului, asemenea marimi sunt unghiurile de rotatie ale axului sau in raport cu directiile celor 3 axe de coordonate: X-X, Z-Z, Y-Y. Daca va fi exclusa posibilitatea de rotire a axului giroscopului in jurul unei din axeleY-Y sau Z-Z, atunci giroscopul va avea 2 grade de libertate, deoarece pozitia lui se va determina prin 2 unghiuri de rotire in jurul a numai 2 axe.
Daca se exclude posibilitatea rotirii in jurul axelor Y-Y si Z-Z atunci giroscopul va avea un singur grad de libertate si va deveni un corp care se va roti in jurul axei principale X-X.
Giroscopul cu 3 grade de libertate asupra caruia nu actioneaza nici un fel de moment ale fortelor exterioare, se numeste, in mod conventional, giroscop liber.
Pentru ca giroscopul sa fie liber este necesar ca el sa aiba un punct de suspensie care sa coincida cu centrul sau de greutate. In acest caz, momentul fortelor de gravitatie va fi egal cu 0 pentru orice inertie a axelor.
Punctul de suspensie sau centrul giroscopului este chiar punctulde intersectie a celor 3 axe de coordonate.
In jurul acestui punct se executa:
miscarea de rotatie a giroscopului in jurul axei principale, sau in jurul axei X-X,
miscarea axei principale in plan vertical in jurul axei Y-Y;
miscarea axei principale in plan orizontal in jurul axei Z-Z.
Proprietatile giroscopului liber
Giroscopul liber, pus in functiune, are doua proporietati: inertia si precesia.
- Inertia giroscopului liber
Daca giroscopulului i se va imprima o miscare de rotatie cu o viteza mare, se va observa ca axul lui principal capata stabilitate, adica isi va mentine directia principala in raport cu spatiul interstelar. In aceasta situatie, in timpul rotirii suportul cu suspensia cardanica intr-o anumita directie, axul principal isi mentine directia principala, iar daca se aplica o forta de deviere a axului principal de la aceasta directie initiala se observa ca giroscopul va opune o rezistenta insemnata.
Tendinta giroscopului de asi pastra in mod constant pozitia lui initiala in spatiu este rezultatul actiunii legii momentelor cantitatii de miscare.
Prin definitie, in cazul giroscopului liber, momentul M al fortelor exterioare, inclusiv momentul produs de forta de gravitatie, trebuie sa fie egala cu 0.
In aceasta situatie relatia care exprima legea momentelor cantitatii
de miscare se noteaza astfel:
|
dH = M = U = 0
adica viteza extremitatii vectorului momentului cinetic este egala cu 0, deci H nu se modifica, ramanand constant ca marime si directie.
Acest fenomen reprezinta prima proprietate a giroscopului cunoscut sub numele de inertia giroscopului.
De retinut ca aceasta directie invariabila a axului giroscopului se mentine fata de stele si nu fata de pamant, a carui forta de rotatie nu produce nici un moment al fortelor exterioare si deci nu influenteaza cu nimic directia axului.
- Precesia giroscopului
La un giroscop cu 3 grade de libertate se constata ca, daca este supus actiunii mai multor momente deviatoare, fiecare dintre ele provoaca o miscare de deplasare a axei asupra careia se exercita intr-o directie perpendiculara pe directia fortei care actioneaza asupra unui din capetele axei.
Miscarea giroscopului datorita actiunii momentului fortei deviatoare exterioare, care se transmite in directie perpendiculara pe directia in care actioneaza forta se numeste miscarea de precesie sau precesia giroscopului.
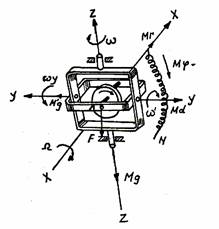
Pentru intelegerea miscarii de precesie a giroscopului cu 3 grade de libertate, al carui rotor are o viteza unghiulara in jurul axei X-X si un moment de rotatie Mr, se presupune ca in punctul A al inelului cardanic interior se exercita o forta exterioara F, al carui moment deviator Md = F.R., tinde sa roteasca axa principala X-X a giroscopului in jurul axei Y-Y cu o viteza unghiulara ωy. Sub actiunea momentului deviator Md si a momentului de rotatie Mr se produce miscarea de precesie a giroscopului, adica rotirea inelului cardanic exterior in jurul axei Z-Z, cu viteza unghiulara ω. Deci, apare un cuplu care provoaca aceasta miscare de precesie si a carui moment se numeste momentul giroscopic (Mg).
Sensul miscarii de precesie (adica al vectorilor ω si Mg) se determina, stiind ca giroscopul tinde sa-si roteasca axa sa principala in directia miscarii unghiului dintre vectorul momentului de rotatie Mr si vectorul momentului deviator Md.
|
|
|
Fig. 2 |
Aplicatii ale giroscopului
Transformarea giroscopului liber in girocompas
Referitor la proprietatea pe care o are giroscopul liber de a-si mentine neschimbata in spatiu directia axei principale, s-a aratat ca, in timpul miscarii diurne a Pamantului, axa principala a giroscopului situat la o latitudine oarecare, executa o miscare aparenta de rotire in jurul verticalei locului si de inclinare fata de orizont. Aceste miscari au loc ca urmare a rotirii simultane a planului orizontului in jurul meridianului si a planului meridianului in jurul verticalei locului.
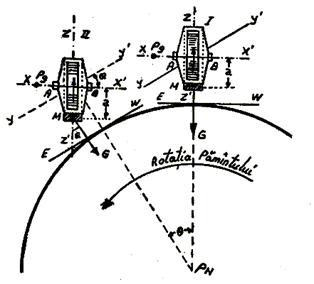
Pentru determinarea vitezelor unghiulare de rotatie in spatiu a planului orizontului si a planului meridianului intr-un punct oarecare, se descompune vectorul vitezei unghiulare a Pamantului (ωp) in doua componente orientate astfel: una pe directia meridianului (ω0) si a doua pe directia verticalei locului (ωv) figura 3.
Considerand latitudinea geografica a locului ϕ, rezulta relatiile:
ωv = ωp cosϕ;
ω0 = ωp sinϕ.
Marimea ω0 se numeste componenta orizontala a rotatiei terestre si caracterizeaza viteza unghiulara cu care planul orizontului se roteste in jurul meridianului, iar marimea ωv se numeste componenta verticala a rotatiei terestre si caracterizeaza viteza unghiulara cu care planul meridianului se roteste in jurul verticalei locului.
Viteza unghiulara de rotatie a planului meridianului este egala cu zero la ecuator si este maxima la poli, iar viteza unghiulara de rotatie a planului orizontului este maxima la ecuator si egala cu zero la poli.
|
|
|
Fig. 3 |

Cunoscand aceste componente ale rotatiei Pamantului se pot determina cu usurinta vitezele unghiulare de rotatie aparenta axului giroscopului.
Componentele miscarii aparente a axului giroscopului, la aceeasi latitudine ϕ, sunt egale ca valoare cu ω0 si ωv insa de sensuri contrare.
Giroscopul poate fi utilizat deci ca girocompas (sa se orienteze in meridian) numai daca se vor compensa deplasarile aparente ale axului sau, datorita miscarii diurne a Pamantului.
Pentru compensarea acestor deplasari se foloseste proprietatea de precesie a giroscopului.
In scopul mentinerii axului principal al giroscopului in meridian, sau pe o directie constanta fata de aceasta, se aplica giroscopului o forta verticala care da nastere la o precesie orizontala cu viteza unghiulara:
ωv = ωp sinφ
Precesia orizontala a axului principal al giroscopului se realizeaza prin coborarea centrului de greutate al giroscopului.
Se considera giroscopul la ecuator si in momentul initial axul sau principal este orizontal si orientat pe directia est vest.
Se observa din fig. 4 ca centrul de greutate al giroscopului e coborat fata de centrul de suspensie prin adaugarea unei greutati pe partea inferioara a carcasei (portiunea hasurata). In pozitia I vectorul greutatii G este orientat pe directia verticalei locului. Intru-cat distanta dintre centrul de suspensie si punctul de aplicare al fortei G este egala cu 0, asupra axului principal al giroscopului nu va actiona nici un moment de precesie suplimentara.
Dupa un interval de timp, Pamantul s-a rotit cu unghiul θ si giroscopul se afla in pozitia II.
Potrivit proprietatii de inertie a giroscopului axa sa principala ramane neschimbata in spatiu, deci axa Z-Z este inclinata cu un unghi θ fata de verticala locului.
In aceasta noua situatie forta greutatii G care se mentine orientata spre ventrul Pamantului nu mai coincide cu axa principala Z-Z, care nu trece prin centrul giroscopului.
Ca urmare, apare un moment de precesie care va tinde sa roteasca axa principala X-X in jurul axei verticale Z-Z si sa o aduca in meridian.
Marimea momentului de precesie, deci viteza de orientare in meridian, depinde de marimea greutatii suplimentare si de unghiul de inclinare a axei principale de giroscopului.
|
|
|
Fig. 4 |
Din figura 4 rezulta ca bratul fortei produsa de greutatea suplimentara este egala cu a sin θ, unde: a este distanta dintre centrul de suspensie si centrul de greutate al sistemului, iar θ este unghiul de inclinare a axului giroscopului.
Momentul de precesie a axului principal al giroscopului, creat in urma adaugarii greutatii suplimentare G, sau momentul de pendul este egal cu:
Mp = m g sinθ
unde m = masa greutatii G, iar g este acceleratia gravitatiei terestre.
Ca urmare a actiunii momentului de pendul (Mp), axul principal al giroscopul se va roti in jurul axei verticale Z-Z cu viteza unghiulara de precesie.
ω = m ga sinθ/j
Sensul acestei miscari de precesie se determina dupa regula polilor: polul giroscopului se deplaseaza pe calea cea mai scurta spre polul fortei care a produs precesia.
In figura 4 polul giroscopului Pg este varful momentului cinetic H si este orientat spre est, iar polul fortei este situat pe axa orizontala Y-Y, spre nord. Prin urmare, avand o precesie sub actiunea momentului de pendul, polul giroscopului se va deplasa spre partea nordica a meridianului
LORAN
LORAN este un sistem de naviagtie pentru determinarea pozitiei prin unde radio. Denumirea provine de la primele litere ale cuvintelor LOng RAnge Navigation ( Navigarea pe distanta mare). Principiul de functionare al acestui sistem se bazeaza pe diferenta timpului de deplasare (de la punctual de observare) a unor semnale radio de la doua statii de transmisie localizate la cateva sute de mile departare. Pentru a specifica diferenta de timp, receptorul traseaza o curba matematica denumita hiperbola. Determinand intarzierea de la a doua statie de transmisie se traseaza a doua hiperbola. Pozitia observatorului trebuie sa se afle la intersectia celor doua curbe.
Unitatea DAS-3 LORAN a submarinului WW-II este o combinatie dintre un receptor radio si un indicator si este capabil sa determine in timpul sosirii a semnalelor cu aproximatie de o microsecunda. Aceasta masurare determina o linie particulara a pozitiei (o hiperbola) care este indicata in diagrame specifice. Masuratori similare au fost facute de doua statii LORAN .
In ceea ce priveste giroscopul se poate vorbi despre cazul inginerului Eric Laithewaite care a avut un mare impact in anii 1975-1980. Dupa studii indelungate si realizari recunoscute Laithewaite, profesor universitar a fost chiar membru al acestui institut. Preocuparile sale l-au condus la studiul de detaliu al giroscopului. Giroscopul este un dispozitiv ce pare ireal, din alta lume, si care asculta de legile unei fizici proprii. In limbaj popular i se spune titirez. Este deci un dispozitiv jucarie cu care fiecare s-a jucat macar o data. Totusi la dimensiuni mai mari, se transforma intr-un mecanism cu caracteristici ireale.
|
|
|
Diferite tipuri de giroscoape |

Laithewaite a reusit sa transforme miscarea rotativa a giroscopului in miscare de translatie inventand motorul linear. Apoi a constatat cu stupoare ca daca unui giroscop de cca 1oo de kg, prins pe un ax i se imprima miscarea de rotatie specifica, apucand axul cu o mana intregul dispouitiv poate fi rotit deasupra capului cu abilitatea celui care roteste un baston ninja. Cu alte cuvinte miscarea de rotatia a giroscplului anuleaza o parte din gravitatie. A ajuns astfel la ideea unui motor de propulsie spatiala, numai ca descoperirea sa nu respecta legea a treia a inaintasului sau Isaac Newton, Orice actiune creaza o reactiune egala si de sens contrar. Giroscopul produce insa o reactiune mai mare si supusa altor legi. Desigur Laithewaite a facut o demonstratie simpla dar edificatoare in fata asistentei uluite, urmand ca cercetarile sa fie dezvoltate cu interesul si amploarea necesara. Numai ca Institutul de stiinta l-a acuzat pe Laithewaite de escrocherie stiintifica, si de erezie stiintifica, dupa scenariul cunoscut. Apoi a fost ridiculizat, discreditat, exclus din institut, i s-a retras dreptul de a conferentia, toate fondurile alocate cercetarii au fost retrase, iar descoperirea sa ascunsa si condamnata la uitare. Acum ocupa un loc de neinvidiat in lucrarea lui Richard Milton Forbidden science (Ereziile stiintifice), alaturi de alti confrati precum: Edison, Faraday, Nicolae Teslea.
| Contact |- ia legatura cu noi -| | |
| Adauga document |- pune-ti documente online -| | |
| Termeni & conditii de utilizare |- politica de cookies si de confidentialitate -| | |
| Copyright © |- 2025 - Toate drepturile rezervate -| |
|
|
|||
|
|||
|
|||
Lucrari pe aceeasi tema | |||
|
| |||
|
|||
|
|
|||