|






 |  |

| Aeronautica | Comunicatii | Drept | Informatica | Nutritie | Sociologie |
| Tehnica mecanica |
Tehnica mecanica
|
|
Qdidactic » stiinta & tehnica » tehnica mecanica Aplicatii tehnice ale staticii |
Aplicatii tehnice ale staticii
APLICATII TEHNICE ALE STATICII
1. Generalitati
Obiectul acestui capitol este studiul echilibrului unor sisteme de corpuri intilnite in tehnica sub denumirea de dispozitive mecanice simple .Aceste dispozitive simple sunt folosite pentru deplasarea punctului de aplicatie ale unor forte mari numite forte rezistente
( caz particular greutati ) cu ajutorul unor forte sau cupluri de valori mai mici denumite forte sau cupluri motoare , accesibile unor actionari manuale . Functionarea acestor dispozitive simple poate fi explicata pe baza unor notiuni utilizate in Teoria Sistemelor si indicate in
fig. 1.
Fig.1.
Unde :
Fr , Mr - forta , respectiv cuplul rezistent
Fm , Mm - forta , respectiv cuplul motor
Deoarece toate ecuatiile de echilibru ale corpurilor considerate rigide , ce alcatuiesc sistemul aflat in studiu , sunt liniare si omogene in raport cu elementele mecanice motoare si rezistente , dupa ce se elimina din aceste ecuatii reactiunile rezulta intotdeauna o relatie de forma :
Fm = lF Fr
unde : lF este raportul de transmitere a fortei , si este o marime adimensionala .
Raportul de transmitere a fortei este cuprins intre doua limite care corespund : una tendintei de miscare la limita in sensul fortei rezistente si cealalta tendintei de miscare in sensul fortei motoare . Deci putem scrie
![]() (2)
(2)
In absenta frecarilor :
![]() (3)
(3)
Din analiza relatiei (2) rezulta doua modalitati de impiedicare a celor doua tendinte de miscare denumite : autofranare si autoblocare .
Fenomenul de autofranare
O masina sau un mecanism cu un singur grad de mobilitate are doua posibilitati de miscare : una in sensul provocat de forta de rezistenta , si cealalta in sensul determinat de forta motoare.Este cunoscut faptul ca in tehnica se cauta a se evita prima posibilitate intrucat s-ar putea provoca accidente , masinile respective fiind prevazute cu dispozitive care blocheaza acest sens al miscarii (frane , clicheti) . Este insa de dorit ca o asemenea miscare sa fie impiedicata si prin actiunea sistemului de forte care apar intre corpurile rigide ce alcatuiesc masina , in acest caz apare fenomenul de autofranare. Conditia de autofranare este:
![]() (4)
(4)
unde semnul egal indica un echilibru la limita de alunecare .
Fenomenul de autoblocare
In functionarea dispozitivelor simple pot exista anumite pozitii pentru care incercarea de a-l pune in miscare in sensul determinat de forta motoare sa conduca la valori infinit de mari ale acesteia ; in acest caz apare fenomenul de autoblocare . Fenomenul de autoblocare si de autofranare va fi analizat in mod concret la mecanismul surub-piulita.
Dispozitivele mecanice simple pot fi impartite in doua tipuri :
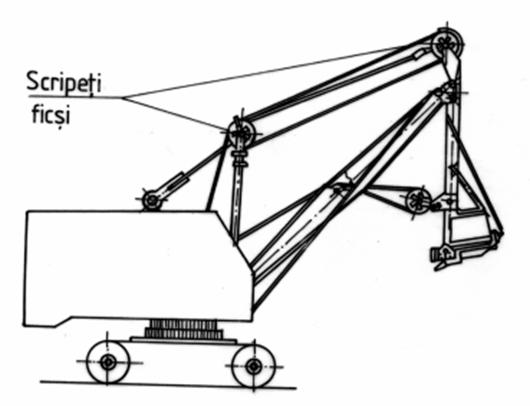
a. tipul parghiilor : parghia , aparate de cantarit , sisteme de parghii articulate , scripeti si sisteme de scripeti .
b. tipul planului inclinat : planul inclinat , pana , surubul , mecanismul surub-piulita
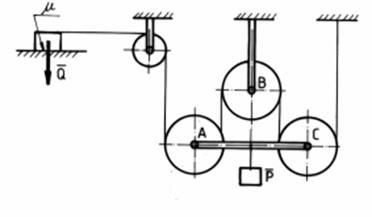
2. Sisteme de scripeti
2.1. Scripetele simplu
Scripetele este alcatuit dintr-un disc de raza R, pe a carui periferie s-au executat unul sau mai multe santuri de ghidare pe unde poate sa treaca un cablu sau un lant , care materializeaza firul teoretic . Scripetele se numeste fix sau mobil dupa cum axul sau este fixat sau se poate deplasa .
2.2. Scripetele fix
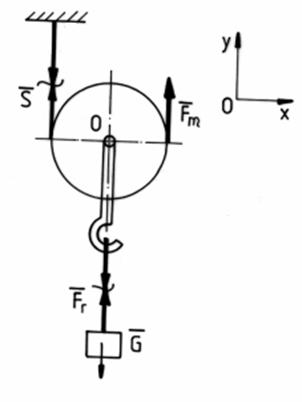
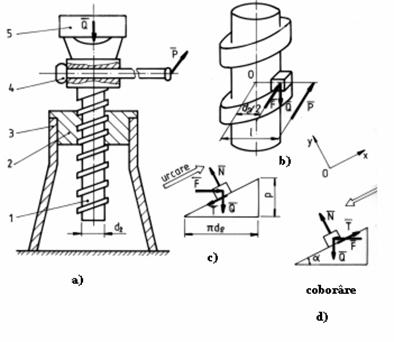
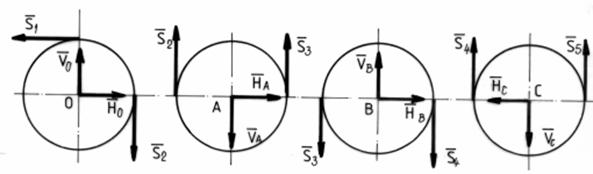
Se considera un scripete
fixat cu articulatia O , al carui fus are raza r si coeficientul de frecare ![]() . De un capat al firului se pune
corpul care trebuie ridicat , greutatea corpului constituind forta de
rezistenta , iar de celalalt capat se trage in jos cu o
forta
. De un capat al firului se pune
corpul care trebuie ridicat , greutatea corpului constituind forta de
rezistenta , iar de celalalt capat se trage in jos cu o
forta ![]() care reprezinta forta motoare . Deoarece
cablurile nu sunt perfect flexibile ci opun rezistenta la schimbarea
formei , atunci cand scripetele se roteste , ramura care se
infasoara se opune trecerii de la forma rectilinie la cea
circulara , iar ramura care se desfasoara se opune trecerii
de la forma circulara la forma rectilinie si ,ca urmare, apar
abaterile e1 si e2 ( fig.2 )
care reprezinta forta motoare . Deoarece
cablurile nu sunt perfect flexibile ci opun rezistenta la schimbarea
formei , atunci cand scripetele se roteste , ramura care se
infasoara se opune trecerii de la forma rectilinie la cea
circulara , iar ramura care se desfasoara se opune trecerii
de la forma circulara la forma rectilinie si ,ca urmare, apar
abaterile e1 si e2 ( fig.2 )
Fig.2
Pentru schema de calcul din fig.2 ecuatiile scalare de echilibru sunt :
SFiy = 0 ; N = Fm + Fr (5)
SMio = 0 ; Fm ( R - e1 ) - Fr ( R + e2 ) = 0 (6)
la limita : Mf = m r N (7)
Rezolvand ecuatiile (5) , (6) si (7) obtinem :