|






 |  |

| Aeronautica | Comunicatii | Drept | Informatica | Nutritie | Sociologie |
| Tehnica mecanica |
Tehnica mecanica
|
|
Qdidactic » stiinta & tehnica » tehnica mecanica Calculul hidraulic al rotorului |
Calculul hidraulic al rotorului
CALCULUL HIDRAULIC
Relatiile de calcul si metoda de proiectare in aceasta faza sunt cele clasice imbinate cu facilitatile date de utilizarea calculatorului. Datele campului hidrodinamic meridian intr-un domeniu optimizat functie de tipul rotorului ofera perspectiva unor rezultate cat mai apropiate de realitate. Sectiunile de calcul sunt egale cu numarul liniilor de curent (11 linii de curent) ceea ce inseamna o dublare sau chiar o triplare a lor fata de cazul
utilizarii metodei grafo-analitice de trasare a campului hidrodinamic.
Alegerea domeniului zonei paletate in oricate variante sau optiuni impuse initial constituie o posibilitate in plus de optimizare a paletajului.
1.Alegerea zonei paletajului in domeniul campului hidrodinamic meridian
Din studiul preliminar se cunoaste D2 unde va fi amplasata muchia de iesire. In plan meridian va fi o dreapta inclinata cu unghiul γ2, (fig. 10). Daca nq .35 se recomanda ca γ 2=0, iar pentru nq > 35 se accepta o inclinare astfel incat ea sa fie relativ ortogonala cu linia de curent mijlocie. Orientativ se poate folosi relatia
statistica:
![]()
Muchia de iesire pivoteaza in jurul punctului Pme situat la raza r D2/2 de pe linia de curent mijlocie. Decizia finala o ia operatorul asupra unghiului γ 2.
La intrare exista o infinitate de solutii posibile. Unghiul de inclinare este de asemenea dat orientativde relatia:
![]()
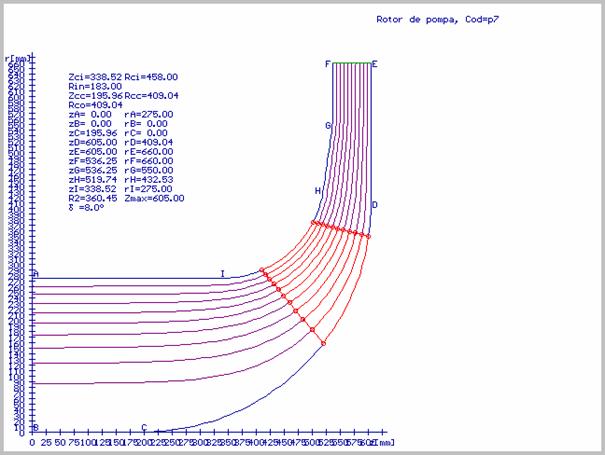
Fig. 10. Marcarea muchiilor de intr. si iesire.
Avand muchia de iesire marcata , programul ofera imaginea din fig. 10 in care pe conturul inel sunt indicate punctele din discretizarea conturului inel. Se alege pozitia
punctului Pmi (de pivotare a muchiei de intrare) astfel incat sa existe suficient spatiu pentru desfasurarea paletajului, deoarece in caz contrar va rezulta un numar exagerat de mare de palete. Muchia de intrare fiind amplasata in zona de curbura a campului hidrodinamic este necesara corelarea pozitiei ei cu valorile extreme ale vitezelor meridiane deoarece la inel avem viteza maxima si viteza de transport u1 este de asemenea maxima, iar la coroana situatia este invers in sensul de extrem minim. Aceste doua viteze implica unghiul β care astfel va avea valori putin diferite intre inel si coroana. Utilizand un algoritm special se decupeaza din domeniul liniilor de curent, a campului de viteze si presiuni zona paletata. Din acest moment restul campului hidrodinamic nu ne mai intereseaza ci doar zona cuprinsa intre muchiile de intrare si de iesire. In aceasta faza orice optiune poate fi urmata de o revenire, daca imaginea variatiei vitezelor in zona paletata (fig. 11), nu corespunde doleantelor. In continuare din campul hidrodinamic ne intereseaza doar zona rotorului in care dorim sa evitam zonele cu risc de crestere a sensibilitatii la cavitatie sau de accentuare a gradului de obturare. De aceea dupa o prima optiune a muchiilor de intrare si iesire se afiseaza din nou variatia vitezelor in lungul liniilor de curent cu marcarea zonei paletate (linie ingrosata in fig. 11, linii de culoare diferita pe ecranul grafic). In general este bine ca muchia de intrare sa fie in zona extremelor curbelor de viteza sau dupa acestea in sensul de curgere. Justificarea este data de doua aspecte:
1°: dupa intrarea curentului in paletaj este bine ca vitezele sa aiba tendinta de scadere si nu de crestere care ar duce la crestrea riscului de aparitie a cavitatiei.
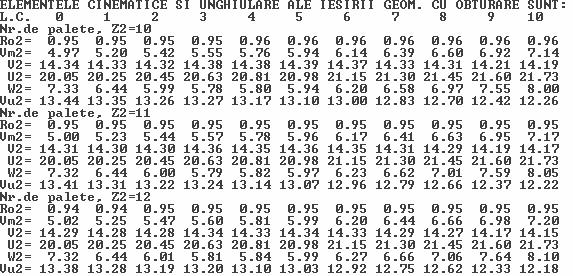
2°: inaltimea triunghiurilor de viteze la intrare (fig. 13) este afectata de valoarea acestor viteze si prin acestea unghiul de constructie al paletajului la intrare, , adica la valori mari ale vitezei de transport, u1, (l.c. inel) sa corespunda valori pe masura pentru vm si invers in zona coroana , astfel incat unghiul sa nu scada sub 10°.
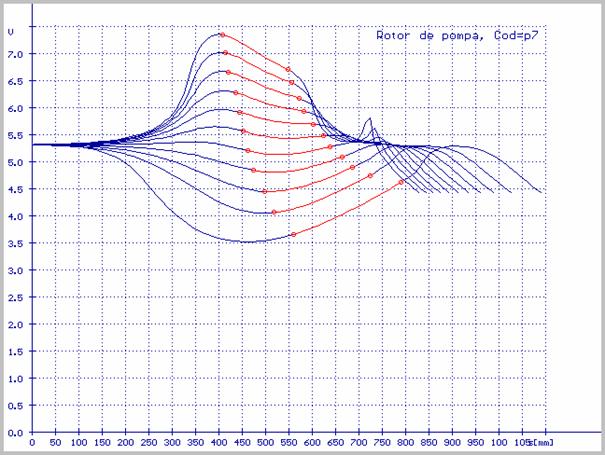
Fig. 11. Marcarea variatiei vitezelor in zona paletata
Daca unghiul scade sub 10° vor fi probleme cu gradul de obturare la intrare in sensul ca ρ <0.6, ceea ce este din nou inacceptabil datorita cresterii sensibilitatii la cavitatie.
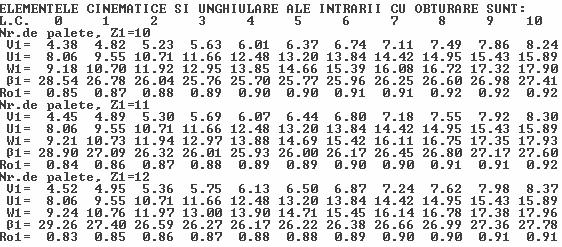
Dupa luarea deciziei finale se afiseaza variatia vitezelor meridiane in lungul muchiilor de intrare si iesire. Aceste viteze vor fi utilizate in calculul elementelor cinematice si unghiulare ale intrarii si iesirii, ele oferind inaltimea triunghiurilor de viteze.
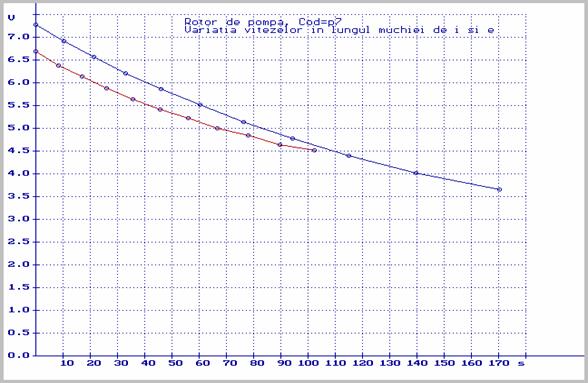
Fig. 12. Variatia vitezelor meridiane in lungul muchiilor de intrare si iesire
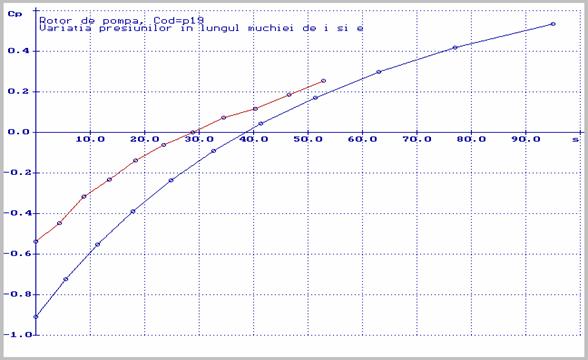
Variatia presiuniloe in lungul muchiiilor de intrare si iesire
Variatia vitezelor in lungul liniei de current din yona paletajului rotoric
2. Dimensionarea intrarii
Datele initiale pentru dimensionarea intrarii sunt vitezele meridionale pe muchia de intrare, razele punctelor de calcul la intersectia liniilor de curent cu muchia de intrare, grosimea paletelor (minimum 4 mm), vitezele de transport (tangentiale) in punctele de calcul: u r1. Numarul de palete se determina cu relatia statistica:
![]() (64)
(64)
unde ![]()
![]() r1, r2,
λ1, λ2 sunt date aferente liniei de curent mijlocie.
r1, r2,
λ1, λ2 sunt date aferente liniei de curent mijlocie.
Unghiul β se calculeaza intr-o prima aproximatie cu relatia:
![]()
iar β este unghiul de intrare fara obturare
![]() (66)
(66)
|
|
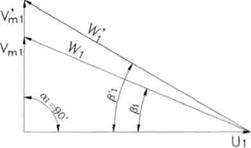
Fig. 13. Triunghiurile la intrare
Conditia esentiala a calculului intrarii este alinierea directiei paletajului la directia curentului data de triunghiul de viteze la intrare. Paletele prin pozitia lor inclinata in
canalul rotoric si prin grosimea lor determina o micsorare a sectiunii normale de trecere a curentului prin toata zona paletata. Masura acestei diminuari este data de gradul de obturare care din punct de vedere geometric reprezinta raportul dintre sectiunea obturata si cea neobturata . In acest sens trebuie sa se tina cont de gradul de obturare, ρ 1, dat de grosimea s1a paletelor:
![]() (67)
(67)
Relatia (67) a rezultat din conditii geometrice. Utilizand o consecinta a relatiei de continuitate (debitul volumic) va rezulta legatura gradului de obturare cu elementele cinematice ale intrarii, (vitezele, in 68). Neavand antestator se considera intrarea normala, α1=90 °, (fig. 11). Viteza meridiana in conditiile obturarii se calculeaza cu relatia:
![]() (68)
(68)
din care rezulta apoi unghiul de constructie al paletajului la intrare:
![]() (69)
(69)
Daca in relatia (69) inlocuim v'm1 cu (68) sau ρ cu (67) obtinem o relatie implicita pentru . Rezolvarea ei se face printr-un calcul iterativ initializat de o valoare probabila a lui ρ (ρ 1= 0,8). Sirul rezultat este rapid convergent spre valoarea cautata.
Rezultate afisate pe ecran la calculul intrarii

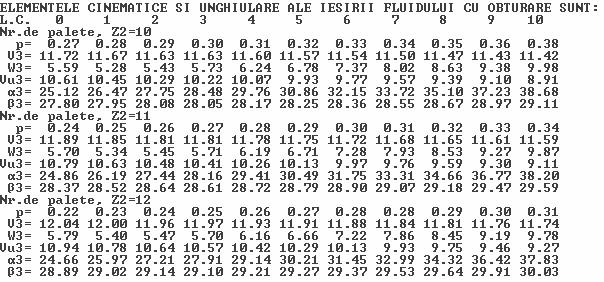
3. Dimensionarea iesirii
Datele initiale ale iesirii sunt vitezele meridionale in punctele de calcul de pe muchia de iesire, razele acestor puncte, grosimea paletelor (minimum 4 mm), viteza de transport in respectivele puncte u r2. La iesire se manifesta efectul de deviere al curentului fata de directia paletajului. Cuantificarea acestuia se face prin coeficientul lui Pfleiderer, p:
 (70)
(70)
unde S =![]() este momentul static al arcului de linie de curent cuprins intre
intrare si iesire. Linia de curent fiind data prin puncte, pentru
calculul numeric al integralei se foloseste insumarea:
este momentul static al arcului de linie de curent cuprins intre
intrare si iesire. Linia de curent fiind data prin puncte, pentru
calculul numeric al integralei se foloseste insumarea:
![]() (71)
(71)
In relatia (71) insumarea este pe arce mici la care se aproximeaza centrul de greutate la mijlocul corzii arcului.
In ipoteza numarului infinit de palete:![]() , deviatia curentului tinde catre zero. Astfel la
iesire se vor lua in considerare doua triunghiuri de viteze (fig.
14), Δ corespunzator
constructiei geometrice si
, deviatia curentului tinde catre zero. Astfel la
iesire se vor lua in considerare doua triunghiuri de viteze (fig.
14), Δ corespunzator
constructiei geometrice si ![]() , iar pentru miscarea reala a fluidului cu deviatie, triunghiul
Δ3.
, iar pentru miscarea reala a fluidului cu deviatie, triunghiul
Δ3.
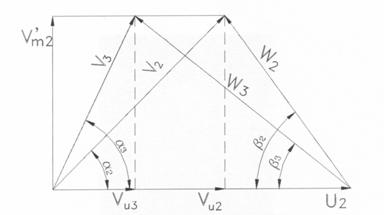
Fig.14. Triunghiurile de viteze la iesire.
Transferul energetic la iesire depinde de trei parametri avand deci trei grade de libertate:
1 ° diametrul de iesire al rotorului D2
2 ° unghiul de constructie al paletajului β
3 ° numarul de palete la iesire z2 (desimea retelei)
Optimizarea simultana a tuturor celor trei optiuni devine foarte dificila. De aceea, in prima faza, pentru diametrul D2 se accepta valoarea determinata initial prin coeficientul inaltimii de pompare ψ H, iar pentru ceilalti doi se combina mai multe variante posibile. Numarul de palete se pastreaza ca variante fiind cele initiale de la calculul intrarii. In caz ca numarul de palete se dubleaza sau se tripleaza la iesire se va tine cont de acest lucru,
|
iar variantele pentru iesire vor fi dublul sau triplul celor de la intrare. Pentru β se testeaza la inceput valoarea probabila rotunjita, data de relatia (65) dupa care functie de rezultatele obtinute se mai aloca si alte variante posibile apropiate de valoarea initiala pana la atingerea conditiilor impuse de verificare:
a) realizarea inaltimii teoretice de pompare
b) indeplinirea conditiei de retea deasa
Relatiile mai importante utilizate in calcule (exceptie cele legate de elementele cinematice si unghiulare rezultate din rezolvarea trigonometrica a triunghiurilor de viteze) sunt:
- Inaltimea teoretica de pompare Ht:
![]() (72)
(72)
- Inaltimea teoretica de pompare in ipoteza numarului infinit de palete Ht .
![]() (73)
(73)
- Legatura intre cele doua relatii ale inaltimii de pompare:
![]() (74)
(74)
- Conditia de existenta a unei retele dese, C
 (75)
(75)
Solutiile optime sunt cele care se apropie cel mai mult de conditiile impuse de relatiile (72) si (75). Lucrand pe 11 linii de curent (suprafete de calcul), la final, pentru comparatie se face media valorilor locale pentru fiecare varianta.
4.Calculul suprafetei schelet a paletei in spatiul dintre intrare si iesire
Traseul dintre intrare si iesire se rezolva prin interpolarea uneia din marimile cinematice semnificative pentru repartizarea incarcarii paletei de-a lungul canalului rotoric. Interpolarea se face in lungul liniei de curent (suprafata de curent in 3D) controlata prin coordonata curbilinie "x" si nu dupa raza curenta "r" deoarece se cuantifica mai bine incarcarea (distributia incarcarii) in zona radial-axiala. Momentul hidraulic este marimea
care reflecta incarcarea paletei intre intrare si iesire. Pentru un punct curent de coordonata curbilinie x acesta se scrie:
![]() (76)
(76)
Din (76) explicitand(rvu)x rezulta:
![]() (77)
(77)
Marimea legata direct de momentul hidraulic este (rvu)x, deci daca controlam variatia de-a lungul canalului rotoric a produsului rvu, atunci rezulta variatia momentului hidraulic cu raza, repartitia inaltimii de pompare partiale, distributia diferentelor de presiune pe fetele paletei. Variatia produsului rvu implica variatia unghiului β necesar de constructie al paletajului in ipoteza ca viteza relativa este tangenta la suprafata schelet a paletei. Inaltimea triunghiurilor de viteze este data de viteza meridiana m v , care este vm corectata cu gradul de obturare, ρ , dat de grosimea paletelor. Daca consideram un punct curent de pe linia de curent notat cu "i", atunci unghiul curent βi rezulta din relatia:
 (78)
(78)
Se observa ca in (78) apar factorii ri ui=ri ω ) si vui, deci indiferent care din cele doua variante le interpolam obtinem acelasi gen de informatii. Se opteaza pentru unghiul β, fiind direct legat de orientarea scheletului paletei in canalul rotoric.
Variatia unghiului β intre intrare si iesire trebuie astfel aleasa incat incarcarea paletei sa fie relative uniforma si variatia sa fie strict crescatoare pe tot domeniul. Pentru o cat mai buna angajare a curentului la intrare si iesire se recomanda ca in vecinatatea punctelor extreme paleta sa fie construita dupa unghiurile inactive. Analizand mai multe cazuri de rotoare se constata ca aceasta conditie este indeplinita daca curba de variatie a lui β are derivata zero la intrare si iesire.
Rezolvarea computerizata este posibila numai printr-o generare analitica. In acest sens s-au ales doua dintre variantele posibile:
a) Interpolarea cu doua arce de parabola racordate in intervalul (x x
b) Interpolarea cu doua arce de parabola racordate cu un segment de dreapta in intervalul (x x
4.1. Interpolarea cu doua arce de parabo a racordate direct
In cazul a) racordarea celor doua arce de parabola se face dupa tangenta comuna in punctul x3. Functiile care definesc cele doua arce de parabola cu axele focale verticale le notam cu f1 si f2 avand ecuatiile generale:
 (79)
(79)
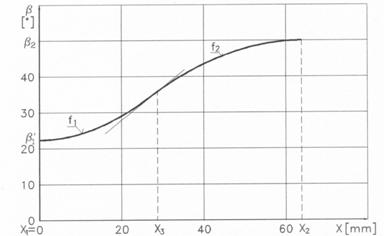
Fig.15. Interpolarea β cu doua arce de parabola racordate direct
Se observa ca pentru a le defini concret este necesara cunoasterea coeficientilor a b c a b c2. Deci avem nevoie de sase ecuatii cu sase necunoscute derivate din ecuatiile (79). Punand conditiile analitice de pozitionare si racordare vom avea conform notatiilor din fig. 15:
II. primul arc de parabola este tangent la orizontala (are derivata nula in x
III. al doilea arc de parabola este tangent la orizontala (are derivata nula in x
IV. cele doua arce de parabola au aceeasi valoare in x3
V. primul arc de parabola trece prin punctul de coordonate (x
VI. al doilea arc de parabola trece prin punctul de coordonate (x
Traducand analitic cele sase conditii va rezulta un sistem de sase ecuatii cu sase necunoscute (80) care se rezolva exact printr-un algoritm de eliminare Gauss.
 (80)
(80)
4.2. Interpolarea cu doua arce de parabola racordate cu un segment de dreapta
In cazul b) racordarea celor doua arce de parabola se face dupa dreapta tangenta comuna in punctele x3, respectiv x4. Functiile care definesc cele doua arce de parabola cu axele focale verticale le notam cu f1 si f2, iar dreapta de legatura f3, avand ecuatiile generale:
 (81)
(81)
Se observa ca pentru a le defini concret este necesara cunoasterea coeficientilor a b c a b c2. m, n. Deci avem nevoie de opt ecuatii cu opt necunoscute derivate din ecuatiile (81). Punand conditiile analitice de pozitionare si racordare vom avea conform notatiilor din fig. 16:
II. al doilea arc de parabola trece prin punctul de coordonate (x
III. primul arc de parabola are aceeasi valoare cu dreapta in x3
IV. al doilea arc de parabola are aceeasi valoare cu dreapta in x4
V. primul arc de parabola este tangent la orizontala (are derivata nula in x
VI. al doilea arc de parabola este tangent la orizontala (are derivata nula in x
VII. primul arc de parabola se racordeaza cu dreapta in x3 dupa directia dreptei, m
VIII. al doilea arc de parabola se racordeaza cu dreapta in x4 dupa directia dreptei, m
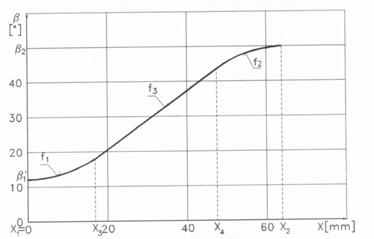
Fig.1 Interpolarea β cu doua arce de parabola racordate cu un segment de dreapta
Traducand analitic cele sase conditii va rezulta un sistem de opt ecuatii cu opt necunoscute (82) care se rezolva exact printr-un algoritm de eliminare Gauss.
 (82)
(82)
In ambele cazuri operatorul poate sa baleeze pozitia punctelor x3 sau x4 in intervalul (x x2) pana la aflarea unei variatii optime pentru forma scheletului paletei ce va rezulta.
Pentru cele doua cazuri putem avea urmatoarele situatii limita:
a) daca x3 ajunge in x1 sau x2 interpolarea se face dupa un singur arc de parabola
b) daca x3 ajunge in x4 cazul b) devine a)
daca x3 ajunge in x1 avem doar segment de dreapta racordat cu arc de parabola
daca x4 ajunge in x2 avem doar arc de parabola racordat cu segment de dreapta
Imaginea in proiectie pe un plan perpendicular pe axa de rotatie se calculeaza si se reprezinta in coordonate polare (r,φ), unde r este raza punctului de pe linia de curent, iar . este unghiul de infasurare al paletei masurat de la intrare. Unghiul . se calculeaza cu relatia:
![]() (83)
(83)
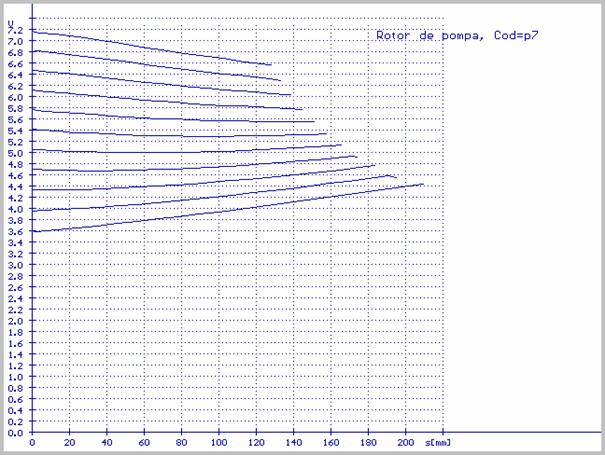
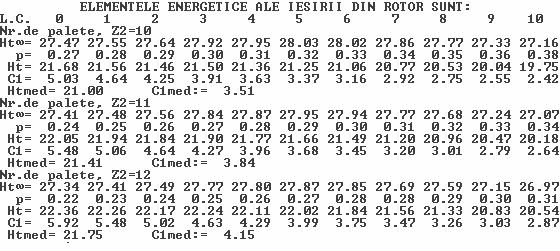
Integrarea se face numeric prin insumarea ariilor partiale utilizand metoda trapezelor. Din calculul campului hidrodinamic putem avea 311 sau chiar mai multe linii de curent. Aplicand relatia (83) pentru fiecare linie de curent va rezulta un . max. In acest moment incepe calculul de optimizare prin care se cauta sa se obtina pentru toate liniile de curent acelasi unghi maxim de infasurare al paletei. Alegand drept φmax de referinta, unghiul φmax corespunzator liniei de curent mijlocii, (linia 5 in caz ca avem 11 linii de curent) folosind un algoritm special se modifica pozitia punctelor x3 (cazul a) sau x3 si x4 (cazul b), pozitia numerica intre 1 si 99, pana cand φmax este acelasi pentru fiecare linie de curent. In cazul rotoarelor cu paletaj radial-axial acest lucru este posibil sa nu se poata realiza. In acest caz se impune conditia ca diferentele intre φmax sa fie uniform crescatoare sau descrescatoare. In fig. 17 se prezinta graficul de variatie a unghiului β pentru cele doua rotoare exemplu.
Tabel cu datele trasarii paletei rotorice in proiectie pt. cele 11 linii de curent
Nr| L.C.=0 | L.C.=1 | L.C.=2 | L.C.=3 | L.C.=4 | L.C.=5 | L.C.=6 | L.C.=7 | L.C.=8 | L.C.=9 | L.C.=10 |
cr| r | Fi | r | Fi | r | Fi | r | Fi | r | Fi | r | Fi | r | Fi | r | Fi | r | F i | r | Fi | r | Fi |
|[mm] | [ø] |[mm] | [ø] |[mm] | [ø] |[mm | [ø] |[mm] | [ø] |[mm] | [ø] |[mm]| [ø] |[mm] | [ø] |[mm] | [ø] |[mm] | [ø] |[mm] | [ø] |
17|277| 17.7|285.8| 12|293.7| 15.0|300.8| 14.0|307.2| 13.1|313.1| 12.3|318.6| 11.6|323.7| 11.0|328.5| 10.4|332.9| 9.9 |337.2| 9.4|
18|284.7| 15.3|293.1| 14.0|300.4| 13.0|309| 12.1|312.9| 11.4|318.4| 10.7|323.5| 10.1|328.4| 9.6b|332.9| 9.1|337.1| 8.6b|341.1| 8.2|
19|292.7| 13.0|300.4| 11.9|307.1| 11.1|313.1| 10.3|318.7| 9.7b|323.8| 9.2|328.6| 8.7b|333.1| 8.2b|337.4| 7.8|341.3| 7.4b|345.1| 7.1|
20|300.8| 10.9|307.8| 10.0|313.9| 9.3 |319.5| 8.7 |324.6| 8.2 |329.4| 7.7|333.8| 7.3 |338.0 | 9 |341.9| 6|345.6| 2 |349.1| 0|
21|308.9| 8.9|315.2| 8.1 |320.8| 7.6 |325.9| 7.1 |330.6| 7 |335.0| 3|339.0| 0 |342.9 | 5.7 |346 | 5.4|350.0| 5.1 |353.3| 4.9|
22|317.0| 7.0 |322.7| 4 |327.7| 5.9 |332.3| 5.6 |336| 5. 2 |340.6| 5.0|344.4| 4.7 |347.9 | 4.5 |351.3 | 4.2|354.5| 4.0 |357.5| 3.9|
23|325.2| 5.1|330.2 | 4.7|334.7 | 4.4|338.8 | 4.1 |342.7| 3.9 |343| 3.7|349.8| 3.5 |353.0| 3.3 |351 | 3.1|359.0| 3.0 |361.8| 2.9|
24|333.4| 3.4|337.7 | 3.1|341.7 | 2.9|345.4 | 2.7 |348.9| 2.6 |352.2| 2.4|355.3| 2.3 |358.2| 2.2 |361.0 | 2.1|363.7| 2.0 |362| 1.9|
25|341.7| 1.7|345.4 | 1.5|348.8 | 1.4|352.0 | 1.3 |355.1| 1.3 |358.0| 1.2|360.8| 1.1 |363.4| 1.1 |360 | 1.0|368.3| 1.0 |370.7| 0.9|
26|349.9| 0.0|353.0 | 0.0|355.9 | 0.0|358.7 | 0.0 |361.4| 0.0 |363.9| 0.0|364| 0.0 |368.7| 0.0 |371.0 | 0.0|373.1| 0.0 |375.2| 0.0|
Tabel cu coordonatele (z,r) ale celor 11 L.C. in zona paletata a rotorului
Nr| L.C.=0 | L.C.=1 | L.C.=2 | L.C.=3 | L.C.=4 | L.C.=5 | L.C.=6 | L.C.=7 | L.C.=8 | L.C.=9 | L.C.=10 |
cr| z | r | z | r | z | r | z | r | z | r | z | r | z | r | z | r | z | r | z | r | z | r | . . |[mm]|[mm |[mm]|[mm]|[mm]|[mm]|[mm]|[mm]|[mm]|[mm] |[mm] |[mm]|[mm] |[mm|[mm] |[mm|[mm] |[mm]|[mm]|[mm] [mm] [mm]
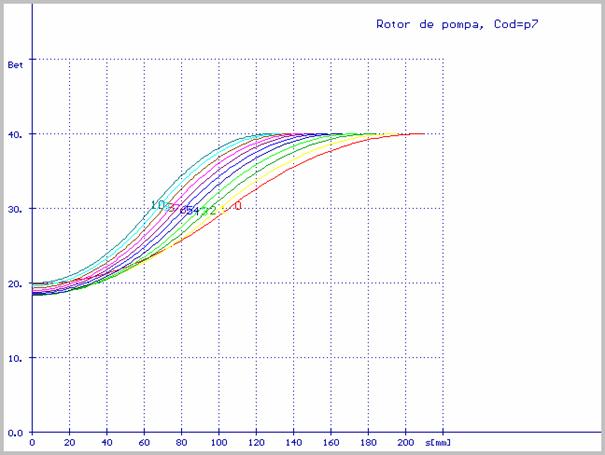
Fig. 17. Variatia unghiului β optimizat pentru cele dou a rotoare
Cu unghiul β astfel interpolat s-au calculat proiectiile paletelor pe un plan perpendicular pe ax. Rezultatele obtinute sunt prezentate in fig. 18 si 19.
4.3.Cazul rotoarelor cu paletaj mixt (palete lungi alterneaza cu palete scurte)
La rotoarele cu nq mic avand extinderea radiala relativ mare si
raportul ![]() apare necesitatea unei retele relativ dese
pentru realizarea inaltimii de pompare si cu z2>6 (z2=numarul de palete
la iesire). Acest lucru are efect negativ la intrarea in rotor prin
cresterea gradului de obturare (ρ <0,6) si ca urmare crescand
vitezele in zona intrarii creste sensibilitatea la cavitatie.
Solutia in acest caz este realizarea unui paletaj mixt, adica
alternativ cate o paleta se reteaza in zona intrarii pana
la o raza la care gradul de obturare devine acceptabil, (ρ >0,7).
Astfel se indeplineste dezideratul de obturare in zona intrarii, iar
la iesire reteaua de palete ramane suficient de deasa
pentru a asigura transferul energetic.
apare necesitatea unei retele relativ dese
pentru realizarea inaltimii de pompare si cu z2>6 (z2=numarul de palete
la iesire). Acest lucru are efect negativ la intrarea in rotor prin
cresterea gradului de obturare (ρ <0,6) si ca urmare crescand
vitezele in zona intrarii creste sensibilitatea la cavitatie.
Solutia in acest caz este realizarea unui paletaj mixt, adica
alternativ cate o paleta se reteaza in zona intrarii pana
la o raza la care gradul de obturare devine acceptabil, (ρ >0,7).
Astfel se indeplineste dezideratul de obturare in zona intrarii, iar
la iesire reteaua de palete ramane suficient de deasa
pentru a asigura transferul energetic.
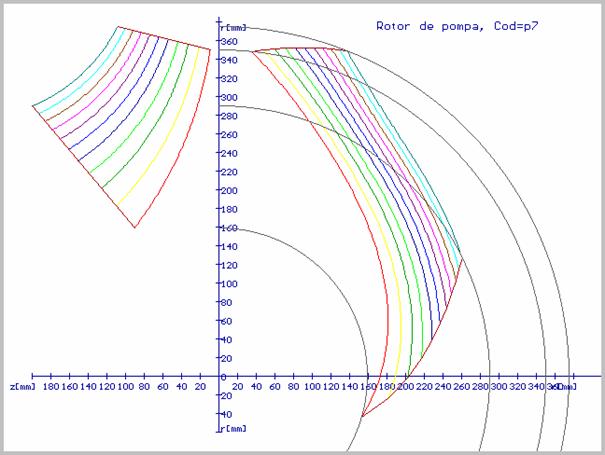
Fig. 18. Paleta rotorica in plan meridian si in proiectie pe un plan perpendicular pe axa de rotatie.
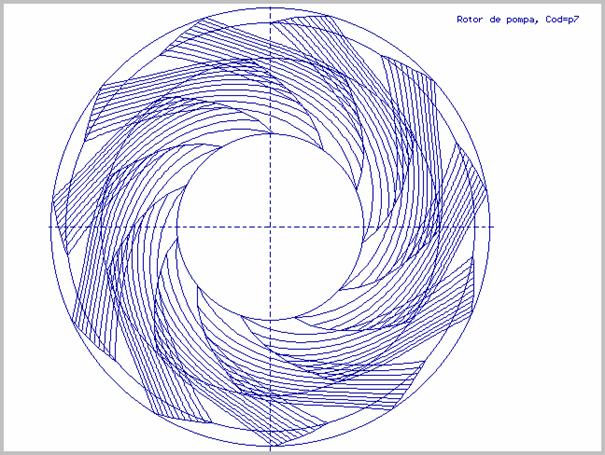
Fig. 19. Paletele rotorice in proiectie pe un plan perpendicular pe axa de rotatie
CONCLUZII
Prin aceste metode de interpolare ale unghiului de constructie β intre intrare si iesire se pot obtine forme optimizate ale paletelor pompelor centrifuge. Ceea ce inainte cand nu se utiliza calculatorul programabil era
aproximativ si presupunea un efort mare de calcul manual, acum se poate obtine in cateva minute de prelucrare a datelor initiale. Pornind de la acest mod de rezolvare analitica a problemei se pot imagina si alte functii de interpolare cu alte restrictii. Operatorul poate sa testeze intr-un timp foarte scurt un numar mare de variante pana
obtine configuratia optima a paletajului mixt din rotoarele de pompa centrifuga. Fisierele de date rezultate in urma acestor prelucrari pot fi folosite in continuare, in AutoCAD pentru desenul de executie al rotorului sau pentru tehnologia de fabricatie.
| Contact |- ia legatura cu noi -| | |
| Adauga document |- pune-ti documente online -| | |
| Termeni & conditii de utilizare |- politica de cookies si de confidentialitate -| | |
| Copyright © |- 2025 - Toate drepturile rezervate -| |
|
|
|||
|
|||
|
|||
Proiecte pe aceeasi tema | |||
|
| |||
|
|||
|
|
|||