|






 |  |

| Afaceri | Agricultura | Comunicare | Constructii | Contabilitate | Contracte |
| Economie | Finante | Management | Marketing | Transporturi |
Electrica
|
|
Qdidactic » bani & cariera » constructii » electrica Structura si integrarea sistemelor de comanda |
Structura si integrarea sistemelor de comanda
STRUCTURA SI INTEGRAREA SISTEMELOR DE COMANDA
1. Structura generala a sistemului de comanda.
Robotul este un sistem complex realizat cu calculatoare, microprocesoare, senzori, sisteme de actionare, structuri mecanice, care are capacitati de actiune, de percepere, de decizie si de comunicare. Isi desfasoara activitatea in cadrul unui mediu fizic, efectuand operatii umanoide.

Fig.1. Structura bloc a unui robot industrial
Din punct de vedere structural robotul industrial este un ansamblu de 3 sisteme strans interconectate intr-un ansamblu de legaturi organice. In fig.1. s-a reprezentat structura bloc a unui robot.
Sistemul de comanda si sistemul de actionare al robotului pot fi considerate ca un sistem compact numit sistem de comanda care are ca rol principal, punerea in miscare si controlul miscarii elementelor din cadrul sistemului mecanic.
Sistemul de comanda este format dintr-un calculator sau din mai multe calculatoare interconectate si are rolul principal de elaborare comenzi catre - si culegere de informatii de la - sistemul de actionare. Prin intermediul acestor comenzi se asigura coordonarea miscarilor la nivelul intregului robot. De asemenea sistemul de comanda asigura comunicarea cu operatorul uman, preia informatiile de la senzori (de deplasare, de forta, de proximitate) pentru a forma o imagine despre mediu.
In figura 2. s-a prezentat schema bloc generala a unui sistem de comanda robot, in care s-a detaliat sistemul de comanda si partea din sistemul de actionare aferenta unei singure axe.
In sistemul de comanda al robotului exista un modul (calculator dedicat sau subrutina software) numit generator de traiectorie (GT). Acest modul genereaza prin calcul (pe baza conditiilor de deplasare respectiv pe baza traiectoriilor prescrise de catre calculatorul pentru modelarea mediului), coordonatele corespunzatoare traiectoriilor individuale pentru fiecare axa in parte.
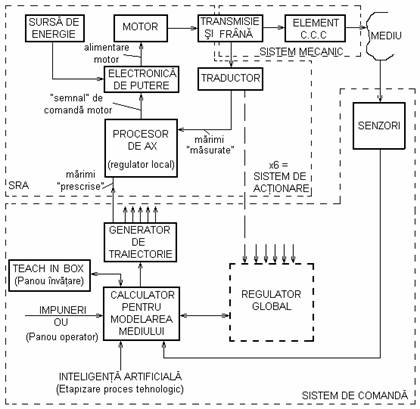
Fig.2. Schema bloc generala a unui robot
Calculatorul pentru modelarea mediului realizeaza dialogul cu operatorul uman (OU) pe baza panoului de invatare (Teach in Box), respectiv a panoului operator; realizeaza culegerea si prelucrarea informatiilor de la senzori, permite sincronizarea robotului cu sistemele de comanda ale utilajelor servite, respectiv asigura integrarea informationala in sisteme de fabricatie de tip FMS (Flexible Manufacturing System) sau C.I.M. (Computer Integrated Manufacturing). Prin calculatorul pentru modelarea mediului poate fi realizata legatura cu sisteme de inteligenta artificiala (de exemplu cu sisteme de vedere artificiala).
Este de remarcat faptul ca inclusiv la roboti evoluati, dotati cu elemente de inteligenta artificiala, comanda miscarilor (reglarea) se efectueaza descentralizat, separat la nivelul fiecarui sistem de actionare in parte.
Se cunosc incercari de realizare a unor sisteme de reglare globala, la nivelul intregului sistem robot in care sa se tina seama de legaturile (profund neliniare) dintre toate cuplele cinematice. De aceea pe schema din figura 2. s-a reprezentat cu linie intrerupta si blocul 'Regulator global' care sugereaza o tendinta de optimizare a procesului de comanda.
2. Integrarea sistemului de comanda.
Integrarea sistemului de comanda trebuie sa ia in considerare resursele fizice generale ale unui sistem robot. Are la baza urmatoarele considerente:
Un robot este un sistem mecatronic multiscop cu mai multe grade de mobilitate, care se afla sub control automat si este reprogramabil.
Functia principala a unui robot este cea de manipulare sau deplasare, de punere in miscare a materialelor sau pieselor. Aici trebuie mentionat faptul ca, chiar daca robotul realizeaza o operatie tehnologica, de exemplu de vopsire sau de prelucrare, el efectueaza in esenta tot operatii de manipulare (a pistolului de vopsit in cazul operatiei de vopsire sau a unei scule in cazul operatiei de prelucrare).
Robotul poate fi considerat un sistem automat, care integreaza mai multe subsisteme.
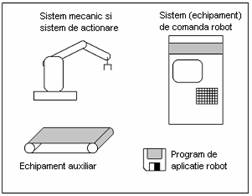
In concordanta cu cele de mai sus subsistemele unui sistem robot (fig.3.) sunt urmatoarele:
subsistem mecanic (mechanical subsystem);
subsistem de comanda robot (robot control subsystem);
echipament auxiliar (auxiliary device);
program de aplicatie robot (robot application program).
Subsistemul mecanic este a cea parte a sistemului robot prin care se realizeaza operatiile fizice de manipulare. Subsistemul mecanic este pus in miscare prin intermediul subsistemului de comanda robot. Acest subsistem, pe langa conducerea (comanda si actionare) a miscarilor subsistemului mecanic mai realizeaza si coordonarea acestora cu functionarea unui echipament auxiliar (care este separat de subsistemul mecanic atat fizic cat si logic respectiv este necesar pentru realizarea unui anumit proces tehnologic de fabricatie). Functiile de comanda/coordonare a intregului sistem robot sunt indeplinite prin intermediul unui program de aplicatie robot.
|
Fig.3. Sistemul robot si subsistemele acestuia
Intr-un caz general un sistem robot poate sa contina mai multe subsisteme mecanice, cu conditia ca acestea sa fie sub coordonarea unui singur subsistem de comanda. In aceasta acceptiune, un sistem robot are intotdeauna un singur subsistem de comanda.
De asemenea, trebuie mentionat ca intr-un caz general un sistem robot poate avea in dotare mai multe echipamente auxiliare, care sunt coordonate de la acelasi subsistem de comanda. Acesta din urma poate sa contina, mai multe programe de aplicatie robot, insa la un anumit moment dat, numai un singur program poate fi selectat pentru realizarea functiilor de comanda/coordonare a sistemului robot.
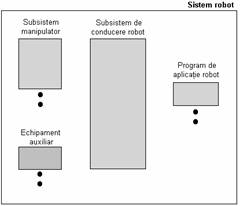
Fig. Modelul resurselor fizice al sistemului robot
Pe baza celor mentionate, fig. reprezinta modelul resurselor fizice ale unui sistem robot.
Resursele fizice ale subsistemului mecanic
Elementul central al unui sistem robot este subsistemul mecanic. Resursele fizice ale acestuia, care sunt necesare a fi accesate de la distanta sunt: dispozitivul de ghidare (robot arm) si efectorul final (end effector). In plus fata de acesta, se considera ca in unele cazuri, subsistemul mecanic poate avea si capabilitati de deplasare (locomotive capabilities), materializata prin intermediul unui subsistem de deplasare (locomotion subsytem). Un exemplu in acest sens pot fi robotii mobili.
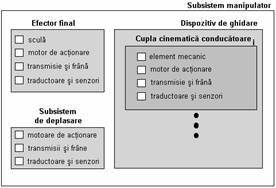
Fig.5. Modelul resurselor fizice ale subsistemului mecanic.
Dispozitivul de ghidare este acea parte a subsistemului mecanic care are functia de a deplasa efectorul final, impreuna cu obiectul care a fost solidarizat cu acesta, intr-o anumita pozitie. Este realizat sub forma unui lant cinematic, care se compune dintr-un set de elemente mecanice (mechanical link). Elementele sunt racordate intre ele constituind cuple cinematice conducatoare (joint) numite si articulatii.
Fiecare cupla cinematica conducatoare (prescurtat: c.c.c.) are numai un singur grad de libertate, adica admite o singura miscare. Miscarea permisa poate fi de rotatie sau de translatie. Astfel deosebim c.c.c. de translatie (prismatic joint) respectiv de rotatie (revolute joint).
Pentru punerea in miscare a unui element mecanic, fata de celalalt din componenta c.c.c., se utilizeaza cate un motor de actionare (actuator) respectiv cate o transmisie mecanica, la nivelul fiecarei cuple cinematice conducatoare. Transmisia mecanica este utilizata pentru transmiterea miscarii de la motorul de actionare la elementul mecanic respectiv.
Se considera ca fiecare c.c.c. (numita si axa a robotului) poate fi sincronizata separat, poate avea limite de cursa superioara si inferioara (upper and lower bounds), poate avea cate o frana (brake) si are asociat un set de parametrii de legatura (link parameters), prin care poate fi descrisa pozitia relativa a elementului pus in miscare.
Cuplele cinematice conducatoare sunt sub conducerea nemijlocita si independenta a unor servosisteme de actionare (servomechanism), specifice motoarelor de actionar. Exista cate un servosistem de actionare separat pentru fiecare c.c.c. Un astfel de servosistem emite semnale de comanda catre motorul de actionare si obtine informatii feedback de la traductoarele aflate la nivelul c.c.c.
Efectorul final are functia de a solidariza obiectul manipulat de ultimul element al dispozitivului de ghidare. Poate fi format in general dintr-un dispozitiv de prehensiune, scula sau cap de forta.
Efectorul final poate fi sub actiunea unui motor de actionare si poate contine traductoare si senzori utilizate in comanda motorului de actionare sau/si pentru preluarea unor informatii feedback de la mediu. La unele tipuri de roboti exista posibilitatea inlocuirii automata sau manuala a efectorului final, cu un altul. Locul de cuplare al efectorului final, de ultimul element al dispozitivului de ghidare, este numit: interfata mecanica (mechanical interface).
Subsistemul de deplasare are functia de modificare a situarii sistemului robot in hala industriala in care este instalat. In general are in componenta o serie de motoare de actionare, transmisii, frane, senzori si traductoare.
Pe baza celor enuntate fig.5. reprezinta modelul resurselor fizice ale subsistemului mecanic.
Resursele fizice ale subsistemului de comanda.
Un element esential in cadrul unui sistem robot este subsistemul de comanda care se materializeaza in general sub forma unui echipament de comanda robot (ECR) numit si controler robot (robot controller). Acest subsistem are ca sarcina comanda intregului sistem robot prin:
comanda subsistemului mecanic;
comanda echipamentului auxiliar;
procesarea programului de aplicatie;
dialogul cu operatorul respectiv comunicatia cu echipamente externe computerizate etc.
Considerand pentru controlerul de robot o arhitectura modulara, unde fiecare modul software controleaza una sau mai multe resurse ale robotului industrial, subsistemul de comanda contine urmatoarele module software, fig.6.:
Controler dispozitiv de ghidare;
Controler efector final;
Controler echipament auxiliar;
Procesor program de aplicatie;
Controler componente periferice;
Controler de comunicatie;
Controler sistem robot.
Observatii:
In cazul in care, subsistemul mecanic contine si un subsistem de deplasare, subsistemul de comanda robot mai contine si un modul de controler de deplasare (locomotion controller).
In cazul in care, sistemul robot contine mai multe subsisteme mecanic, atunci subsistemul de comanda robot integreaza mai multe module de controler dispozitiv de ghidare, cate unul pentru fiecare.
In cazul in care, sistemul robot contine mai multe echipamente auxiliare, atunci subsistemul de comanda robot integreaza mai multe module de controler echipament auxiliar, cate unul pentru fiecare.
Controlerul dispozitivului de ghidare are ca functie, conducerea miscarii dispozitivului de ghidare. Elementul esential al acestui modul este programul de conducere (control program). Acesta de regula are doua parti componente:
un subprogram aferent generatorului de traiectorie;
si o serie de subprograme aferente procesoarelor de ax.
Generatorul de traiectorie accepta comenzi de la procesorul program de aplicatie (sau de la alte surse locale), pentru punerea in miscare a dispozitivului de ghidare respectiv realizeaza convertirea acestor cereri, intr-un sir de comenzi periodice (in timp), specifice procesoarelor de ax. In mod efectiv, generatorul de traiectorie este responsabil pentru convertirea unei traiectorii exprimate prin situarea, viteza si acceleratia dorita a sculei (tool), in comenzi adecvate procesoarelor de ax.
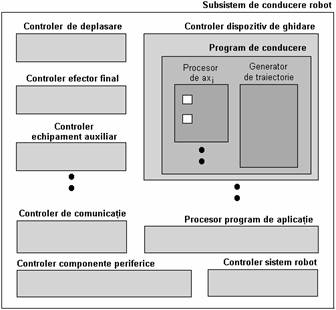
Fig.6. Modelul fizic al subsistemului de comanda robot
Trebuie aratat ca generatorul de traiectorie este responsabil pe langa controlul vitezei si acceleratiei varfului de scula (adica a punctului caracteristic) si de controlul caracteristicilor dinamice ale miscarilor dispozitivului de ghidare.
Observatii:
Viteza programata (programmed speed) este viteza normala prescrisa generatorului de traiectorie, de catre procesorul de program de aplicatie. Aceasta este viteza dorita a varfului de scula si se stabileste in cadrul programului de aplicatie.
Factorul de viteza (speed factor) este un factor de multiplicare, utilizat pentru modificarea uniforma (in sus sau in jos), a tuturor vitezelor programate, in cadrul programului de aplicatie.
Acceleratia programata (programmed acceleration) este acceleratia normala prescrisa generatorului de traiectorie, de catre procesorul de program de aplicatie. Aceasta este acceleratia dorita a varfului de scula si se stabileste in cadrul programului de aplicatie.
Factorul de acceleratie (acceleration factor) este un factor de multiplicare, utilizat pentru modificarea uniforma (in sus sau in jos), a tuturor acceleratiilor programate in cadrul programului de aplicatie.
Valorile de intrare ale generatorului de traiectorie, includ situarea, viteza si acceleratia programata a varfului de scula (exprimat in spatiul cartezian) si descriu starea programata a dispozitivului de ghidare.
Valorile de iesire ale generatorului de traiectorie descriu starea comandata a dispozitivului de ghidare, exprimata in spatiul cuplelor cinematice conducatoare (joint space). Aceste valori de iesire reprezinta, la un anumit moment dat, pozitia, viteza si acceleratia comandata a fiecarei cuple cinematice conducatoare in parte.
In fig.7. s-a reprezentat fluxul general de informatii existent la punerea in miscare a dispozitivului de ghidare.
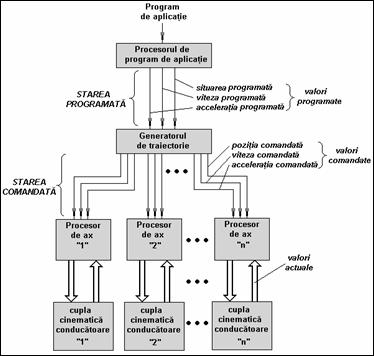
Fig.7. Fluxul de informatii existent la punerea in miscare a dispozitivului de ghidare
Pe baza figurii, procesorul program de aplicatie prelucreaza programul de aplicatie si pentru fiecare task al acestuia (care implica o modificare a situarii curente), elaboreaza cate o stare programata a dispozitivului de ghidare, exprimata in valori carteziene. Aceasta stare programata este apoi transferata generatorului de traiectorie care genereaza prin calcul, seturi succesive de valori comandate.
Un set de valori (generat la un anumit moment dat), reprezinta o stare comandata, exprimata in spatiul cuplelor cinematice conducatoare. Starile comandate sunt transferate, la perioade egale de timp, procesoarelor de ax care prin comanda adecvata a motoarelor (de actionare), pun in miscare relativa elementele c.c.c., cu vitezele respectiv acceleratiile comandate. Prin monitorizarea/urmarirea valorilor actuale adica masurate (ale pozitiilor, vitezelor etc.), se stabileste un control feedback la nivelul c.c.c.
Controlerul efector final are ca sarcina comanda adecvata a motorului de actionare din componenta efectorului final, pe baza comenzilor furnizate de procesorul program de aplicatie, respectiv pe baza informatiilor feedback, furnizate de traductoare si senzori.
Procesorul program de aplicatie, in cadrul subsistemului de comanda robot, stabileste un mijloc pentru executia programului de aplicatie utilizator. Este de asemenea responsabil pentru generarea comenzilor de intrare pentru controlerul de comunicatie (communication controller).
Controlerul componente periferice serveste pentru comunicatia subsistemului de comanda robot cu operatorul uman sau cu echipamente inteligente (computerizate) externe. Ele sunt sub controlul controlerului de comunicatie. Exemple de componente periferice:
terminale,
panou operator,
panou de instruire,
unitati de stocare a informatiei (harddisk),
module I/O de intrare si iesire,
interfata seriala,
interfata de LAN etc.
Controlerul sistem robot este un modul software prin care se realizeaza coordonarea functionarii tuturor subsistemelor din cadrul sistemului robot.
Echipamente auxiliare
Echipamentele auxiliare ale sistemului robot sunt subsisteme dependente de aplicatie care sunt sub conducerea nemijlocita (directa) a subsistemului de comanda robot, prin intermediul unor module denumite controler echipament auxiliar. Exemple de echipamente auxiliare sunt:
sisteme de comanda sudare,
sisteme de vopsire,
sisteme de control jet de apa,
sisteme de vedere artificiala, senzori etc.
Comanda echipamentelor auxiliare este integrata in programul de aplicatie robot. Informatiile utilizate in comanda echipamentelor auxiliare, de exemplu parametrii specifici ai echipamentelor auxiliare, formeaza partea integranta a parametrilor globali ai aplicatiei robot. Comanda echipamentelor auxiliare poate fi implementata intr-un singur sau in mai multe programe din cadrul subsistemului de comanda robot. Echipamentele auxiliare sunt vizibile de la distanta ca o unitate separata, pot fi pornite sau oprite in mod independent de subsistemul mecanic.
Prin intermediul programului de aplicatie robot sunt prescrise de catre un utilizator, intr-un limbaj de programare specific subsistemului de comanda robot, task-urile care trebuie sa fie efectuate de sistemul robot, in vederea derularii complete sau partiale a unei anumite aplicatii robotizate.
Intr-un sistem robot poate fi incarcat, la un anumit moment dat, unu sau mai multe programe de aplicatie robot. Odata incarcat, programul de aplicatie robot intra sub controlul procesorului program de aplicatie al subsistemului de comanda robot. Selectarea unui program de aplicatie robot, in scopul lansarii in executie a acestuia, implica stabilirea unei conexiuni cu controlerul dispozitivului de ghidare.
Lansarea in executie a programului de aplicatie conduce la punerea in miscare a subsistemului mecanic, de catre modulul controler dispozitiv de ghidare.
| Contact |- ia legatura cu noi -| | |
| Adauga document |- pune-ti documente online -| | |
| Termeni & conditii de utilizare |- politica de cookies si de confidentialitate -| | |
| Copyright © |- 2025 - Toate drepturile rezervate -| |
|
|
|||||||
|
|||||||
|
|||||||
Referate pe aceeasi tema | |||||||
|
| |||||||
|
|||||||
|
|
|||||||