|






 |  |

| Aeronautica | Comunicatii | Drept | Informatica | Nutritie | Sociologie |
| Tehnica mecanica |
Tehnica mecanica
|
|
Qdidactic » stiinta & tehnica » tehnica mecanica Identificare dinamica pentru conducerea unui sistem de reglare a presiunii |
Identificare dinamica pentru conducerea unui sistem de reglare a presiunii
Identificare DINAMICA PENTRU CONDUCEREA UNUI SISTEM DE REGLARE A PRESIUNII
1. OBIECTIVELE LUCRARII
Aplicarea tehnicilor de identificare dinamica a proceselor in scopul proiectarii unui regulator pentru conducerea unui sistem de reglare a presiunii.
Elaborarea unui program software de achizitie de date si identificare pentru un sistem de reglare a presiunii.
2. BREVIAR TEORETIC
2.1. Descrierea SRA-P
Sistemul de reglare automata ce urmeaza a fi studiat este destinat reglarii presiunii aerului intr-un recipient si se afla in laborator. Schema sistemului de reglare automata este prezentata in figura 13.1.
Traductorul de presiune PT sesizeaza continuu variatia presiunii P2 si transmite regulatorului PC un semnal electric proportional cu valoarea curenta a acestuia. Regulatorul compara valoarea semnalului Ir cu valoarea Ii asociata prescrierii Pi si in cazul in care apare o abatere se emite o comanda Ic robinetului de reglare, dupa un algoritm de tip PI sau PID. Convertorul electro-pneumatic face posibila compatibilitatea functionarii regulatorului PC - electronic - cu robinetul de reglare RR- pneumatic.
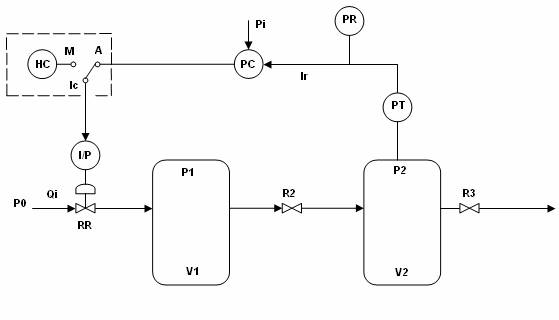
Fig. 13.1. Schema sistemului de reglare automata a presiunii.
Sistemul de reglare este dublat de un element de comanda manuala HC (conturul punctat). Comutatorul ce selecteaza cuplarea/decuplarea sistemului de reglare este amplasat pe elementul de comanda manuala HC.
2.2. Modelul matematic al procesului
In regim dinamic cele doua vase sunt descrise de ecuatiile:
![]() (13.1)
(13.1)
![]() (13.2)
(13.2)
Curgerea prin robinetele R2 si R3 fiind turbulenta, poate fi scrisa relatia
![]() (13.3)
(13.3)
De asemenea, se cunoaste
![]() (13.4)
(13.4)
Inlocuind relatiile (13.3) si (13.4) in (13.2), rezulta:
![]() (13.5)
(13.5)
![]() (13.6)
(13.6)
care, liniarizate in jurul punctului ![]() , conduc la:
, conduc la:

 ;
;
(13.7)
respectiv:
![]()
![]() (13.8)
(13.8)
unde:
 ;
;
 ; (13.9)
; (13.9)
Valori practice pentru constantele de timp si coeficientii de amplificare asociate instalatiei din laborator sunt considerate a fi urmatoarele:
![]()
![]() ;
;
![]() bar
bar ![]() ;
; ![]() bar
bar ![]() ;
;
![]()
![]() ;
;
![]()
![]() ;
;

![]() ;
;

![]() ;
;

![]() ;
;
|

![]() ;
;
![]() ;
;
![]() ;
;

![]() .
.
Este evident ca valorile constantelor ![]() pot fi modificate, printre altele, cu ajutorul
robinetului R2.
pot fi modificate, printre altele, cu ajutorul
robinetului R2.
Avand in vedere ca cele doua vase sunt in interactiune, fapt evidentiat si de modelul matematic, schema bloc a procesului, figura 13.2, contine un element cu reactie.
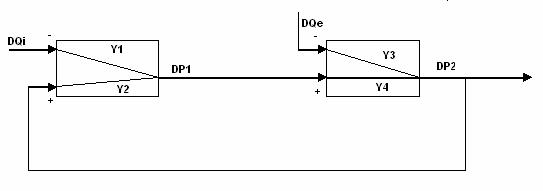
Fig. 13.2. Schema bloc a procesului de acumulare a gazului in cele doua vase cu interactiune
Sistemul de ecuatii diferentiale care reprezinta modelul si schema bloc din figura 13.2 permit evidentierea urmatoarelor functii de transfer:
![]() ,
,
![]() ,
,
![]() ,(13.10)
,(13.10)
![]() .
.
In ansamblu, procesul reprezinta un sistem caracterizat prin functii de transfer ce fac legatura intre marimea de executie, marimea perturbatoare si marimea de iesire.
Pentru procesul de acumulare a gazului din cadrul SRA-P schema bloc este adusa la forma din figura 13.3. Aplicand algebra functiilor de transfer pentru sisteme cu reactie se poate scrie:
![]() (13.11)
(13.11)
ceea ce conduce la
![]() (13.12)
(13.12)
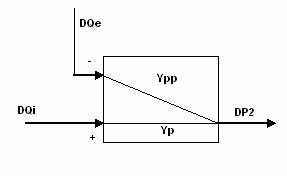
Fig. 13.3. Schema bloc simplificata a procesului
Din relatia de mai sus se deduc functiile de transfer asociate procesului, de forma:
![]()
![]() (13.13)
(13.13)
2.3. Identificarea dinamica in contextul proiectarii unui sistem de reglare
Identificarea este operatia de determinare a caracteristicilor dinamice ale procesului (sistemului), a carui cunoastere este necesara pentru proiectarea si implementarea unui sistem performant de reglare.
Figura 13.4 rezuma principiile generale de proiectare si calcul ale unui regulator
![]()
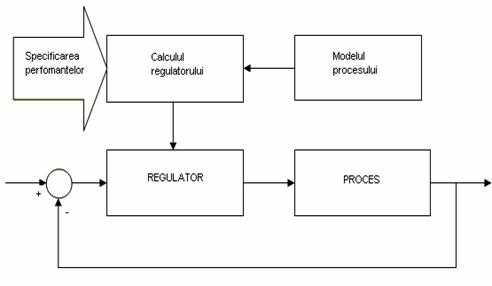
Fig. 13.4. Principiul proiectarii si calculului unui regulator.
Pentru a proiecta corect un regulator sunt necesare:
- specificarea performantelor dorite pentru bucla de comanda/reglare;
- cunoasterea modelului dinamic al procesului (numit model de comanda) ce descrie relatia intre variatiile comenzii si variatiile iesirii;
- disponibilitatea unei metode adecvate de calcul al regulatorului compatibil cu performantele specificate si caracteristicile modelului procesului.
Notiunea de model matematic al unui sistem sau fenomen este un concept fundamental. In general, exista diferite tipuri de modele, fiecare model fiind destinat unei aplicatii specifice.
De exemplu, modelele de cunoastere (bazate pe legile fizice, chimice, etc.) permit o descriere destul de completa a sistemelor si sunt utilizate pentru simularea si modelarea proceselor. Aceste modele sunt, in general, extrem de complexe si rareori direct utilizabile in automatica. Modelele dinamice de comanda, ce dau relatia intre variatiile intrarilor unui sistem si variatiile iesirii, sunt tipuri de modele necesare pentru proiectarea si ajustarea sistemelor de comanda/reglare. Desi indicatii asupra structurii acestor modele de comanda se pot obtine pornind de la structura modelului de cunoastere, in general, este foarte dificil sa se determine valorile parametrilor semnificativi pornind de la aceste modele.
De aceea, in marea majoritate a situatiilor practice, este pusa in aplicare o metodologie de identificarea directa a acestor metode dinamice (de comanda). De notat ca modelele de comanda sunt de doua tipuri:
- modele neparametrice ( raspuns in frecventa, raspuns la treapta).
- modele parametrice ( functie de transfer, ecuatie diferentiala sau cu diferente).
Metoda de identificare clasica utilizata pentru obtinerea modelelor parametrice pornind de la modele neparametrice de tip "raspuns la treapta" este prezentata in figura 13.5.
Aceasta metoda a fost utilizata initial pentru a obtine modele parametrice continue, apoi a fost extinsa pentru identificarea modelelor discrete. Pornind de la forma raspunsului procesului la treapta, se alege un tip de model si se determina grafic parametrii modelului. Cunoscand frecventa de esantionare, se poate obtine cu ajutorul tabelelor modelul discret corespunzator.
Fig. 13.5. Metoda clasica de identificare
Principiul estimarii parametrilor modelelor discrete este prezentat in figura 13.6.
Fig. 13.6. Principiul estimarii parametrilor unui model
Un model discret cu parametri ajustabili este implementat pe
calculator. Eroarea intre iesirea procesului la momentul t, ![]() , si iesirea predictata de model,
, si iesirea predictata de model, ![]() , numita eroare de
predictie, este utilizata de algoritmul de asteptare
parametrica. Acesta va modifica parametrii modelului la fiecare moment de
esantionare, astfel incat sa se minimizeze aceasta eroare.
Intrarea este, in general, o secventa pseudo - aleatoare binara
de un nivel foarte slab, generata de calculator (succesiune de impulsuri
dreptunghiulare cu durata aleator variabila). Odata modelul
obtinut, o validare obiectiva poate fi facuta prin teste
statistice asupra erorii de predictie
, numita eroare de
predictie, este utilizata de algoritmul de asteptare
parametrica. Acesta va modifica parametrii modelului la fiecare moment de
esantionare, astfel incat sa se minimizeze aceasta eroare.
Intrarea este, in general, o secventa pseudo - aleatoare binara
de un nivel foarte slab, generata de calculator (succesiune de impulsuri
dreptunghiulare cu durata aleator variabila). Odata modelul
obtinut, o validare obiectiva poate fi facuta prin teste
statistice asupra erorii de predictie ![]() si iesirii
predictate
si iesirii
predictate ![]() . Testul de validare permite pentru un proces dat sa se
aleaga cel mai bun model, respectiv cea mai buna structura
si cel mai bun algoritm pentru estimarea parametrilor.
. Testul de validare permite pentru un proces dat sa se
aleaga cel mai bun model, respectiv cea mai buna structura
si cel mai bun algoritm pentru estimarea parametrilor.
Calculand si reprezentand grafic raspunsul la o treapta si raspunsul in frecventa al modelului identificat, se poate determina modelul continuu (raspuns la o treapta sau raspuns in frecventa).
3. MODUL DE LUCRU
Echipamentul de conducere este compus din calculator si interfata AX5411.
Se utilizeaza interfata AX5411 multifunctionala, cu urmatoarele caracteristici
Subsistemul intrarilor analogice
Numar de intrari 16 simple (AI0 - AI15)
Rezolutie 12 bit
Frecventa de achizitie 60 kHZ max.
Timpul de conversie A/D 15 μs max
Timpul de achizitie 5μs max/canal
Domenii de intrare ± 10 V, ± 5V, ± 2,5V, ±1.25 V
± 0,625V, ±0,3125V selectabile software
Impedanta de iesire > 10 MΩ, 50 pF
Neliniaritate ± 1 LSB
Eroare inerenta ± 1 LSB
Subsistemul iesirilor analogice
Numar de iesiri 2 (DA0, DA1)
Rezolutie 12 bit
Frecventa 33 kHZ max.
Domenii de iesire 0-5V, 0-10V selectabile hard
Curent de iesire 5 mA max
Subsistemul iesirilor/intrarilor numerice
Intrari numerice 24 (disponibile 8 DI0-DI7)
Iesiri numerice 24 (disponibile 8 DO0-DO7)
Nivele intrare/iesire compatibile TTL
Conector intrare/iesire 50 pini
Caracteristici de interfata
Magistrala compatibila IBM PC AT
Biti adresa utilizati A9- A0
Adresa de baza (port) 300 hexa
Locatii necesare 16 (octeti)
Nivele de intrerupere 2,3,4,5,6,7 (controlabile soft)
Sursa de intreruperi FINISH bit conversie A/D
Optiuni DMA DMA1 sau DMA3 selectabile hard
In figura 13.7 este prezentata asignarea pinilor in conectorul interfetei AX5411. Adresa portului de baza pentru interfata este 0x300. Fata de aceasta, interfata utilizeaza 16 adrese consecutive care constituie spatiul de I/O (R=read, W=write) conform figurii 13.8.
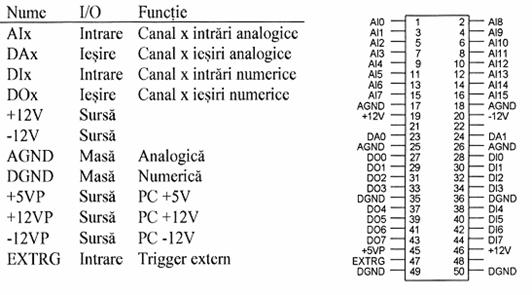
Fig. 13.7. Asignarea pinilor conectorului interfetei AX5411
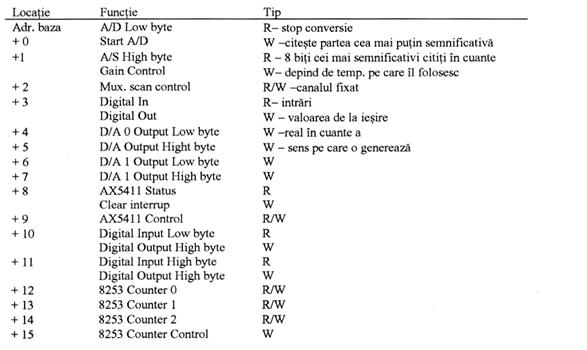
Fig.13.8. Spatiul I/O al interfetei AX5411
Se studiaza aplicatia de achizitie si identificare a parametrilor modelului matematic, care este formata din trei sectiuni principale, descrise in continuare.
Programul de achizitie permite generarea unor tensiuni catre robinet si achizitionarea informatiei primite de la traductorul de presiune (fig.13.9).
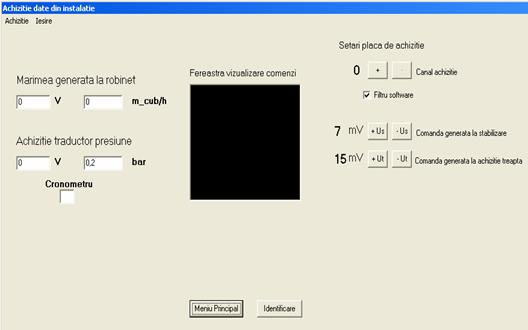
Fig. 13.9. Partea de achizitie a aplicatiei
Programul permite vizualizarea continua a parametrilor instalatiei si a comenzii date catre robinet prin indicatoarele aflate pe forma (fig.13.10).
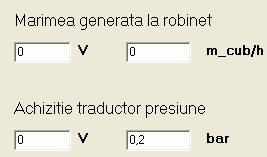
Fig. 13.10. Fereastra vizualizare date din proces
In modul de baza se face achizitia de pe canalul 0, comanda de stabilizare este de 7 mA, comanda pentru treapta aplicata procesului este de 15 mA si filtrul software este activ. Acesti parametri pot fi schimbati utilizand butoanele din partea stanga a ferestrei, prezentate in figura 13.11.
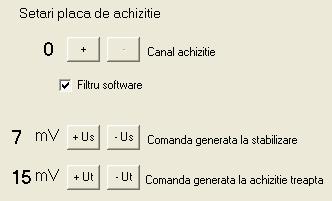
Fig. 13.11.Setari placa de achizitie
Fiecare modificare este adusa la cunostinta utilizatorului prin intermediul ferestrei de vizualizare comenzi. In cazul cand fereastra este plina, pentru a evita pierderea unei informatii, se realizeaza intai o stergere a comenzilor anterioare si apoi se afiseaza ultima comanda executata de catre utilizator.
In figura 13.12 sunt prezentate unele comenzi executate urmand procedura descrisa anterior.
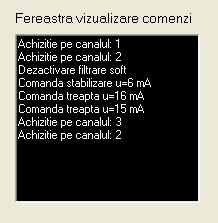
Fig.13.12. Fereastra vizualizare comenzi
Aplicatia permite achizitia datelor generand fie un semnal treapta, fie unul rampa. Acest lucru se realizeaza utilizand meniul prezent in partea de sus a ferestrei, conform prezentarii din figura 13.13..

Fig. 13.13. Meniu generare semnale
Datele achizitionate vor fi salvate in fisierele de tip text: "adi_tp.txt", "adi_rp.txt", direct in radacina disk-ului C.
Din forma de achizitie se poate face o reintoarcere in forma principala sau, dupa achizitionarea datelor, trecere in sectiunea de identificare.
Programul de identificare are o fereastra asociata prezentata in figura 13.14.
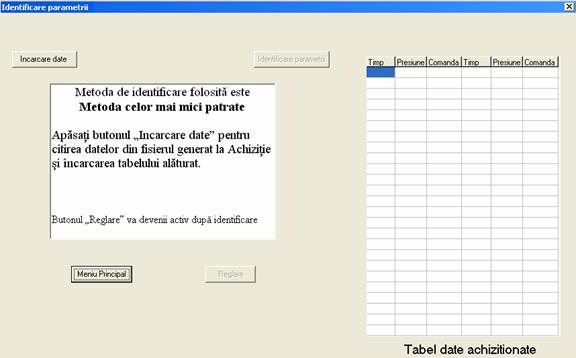
Fig.13.14. Fereastra asociata procedurii de identificare
Tabelul din figura va prelua datele achizitionate din proces dupa apasarea butonului "Incarcare date". Un exemplu, utilizat la aplicarea procedurii de identificare pentru estimarea parametrilor modelului, este prezentat in figura 13.15. Butonul de identificare ramane inactiv pana cand sunt preluate datele din fisierul text realizat in partea de achizitie.
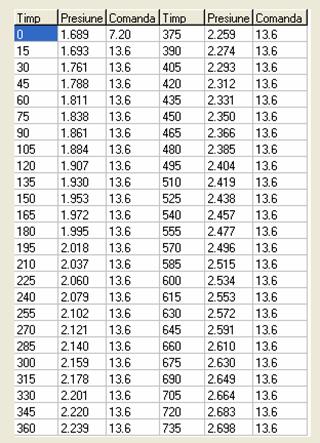
Fig.13.15. Tabelul cu datele achizitionate
In urma derularii procedurii de identificare, pe ecran apare un indicator de tip ProgressBar care arata procentul realizat din identificare (fig.13.16), fereastra care prezinta modelul matematic actualizat in urma identificarii (fig. 13.17) si o asa-numita fereastra de utilizator, care specifica separat valoarea parametrilor estimati in urma aplicarii procedurii de identificare (fig.13.18).

Fig. 13.16. Indicator proces identificare
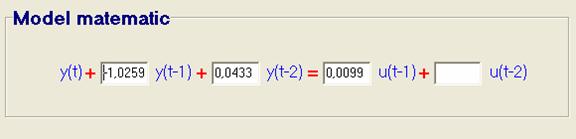
Fig. 13.17. Fereastra model matematic
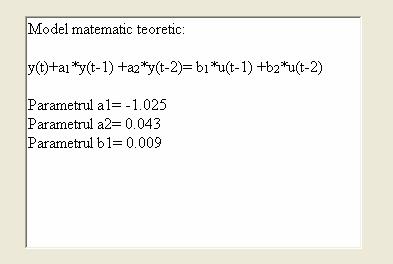
Fig. 13.18.Fereastra informare utilizator
Dupa incheierea procedurii de identificare se poate trece la ultima parte a aplicatiei: reglarea predictiva a sistemului, actionand butonul "Reglare".
| Contact |- ia legatura cu noi -| | |
| Adauga document |- pune-ti documente online -| | |
| Termeni & conditii de utilizare |- politica de cookies si de confidentialitate -| | |
| Copyright © |- 2025 - Toate drepturile rezervate -| |
|
|
|||
|
|||
|
|||
Referate pe aceeasi tema | |||
|
| |||
|
|||
|
|
|||