|






 |  |

| Afaceri | Agricultura | Comunicare | Constructii | Contabilitate | Contracte |
| Economie | Finante | Management | Marketing | Transporturi |
Electrica
|
|
Qdidactic » bani & cariera » constructii » electrica Motoare electrice pas cu pas |
Motoare electrice pas cu pas
Motoare electrice pas cu pas
Motoarele electrice pas cu pas fac parte din grupa motoarelor sincrone , care au drept caracteristica principala faptul ca au turatia strict dependenta de frecventa de alimentare. Motoarele electrice sincrone pot fi impartite in doua mari categorii:
-motoare sincrone de curent alternativ
-motoare pas cu pas
Motoarele sincrone de curent alternativ sunt alimentate cu tensiune alternativa sinusoidala si au turatia dependenta de frecventa acestuia si de caracteristicile constructive ale motorului. Stabilitatea turatiei este determinata direct de stabilitatea frecventei si independenta de momentul rezistent (in limitele normale de functionare), asigurand deci o caracteristica mecanica rigida ideala (sau de tip sincron!). Ele prezinta insa dificultati de pornire pana la intrarea in sincronism, necesitand in acest scop infasurari auxiliare de pornire, si au cuplul de pornire redus, motiv pentru care sunt pornite cu precadere la actionarile de mica putere.
1.Prezentarea generala a motoarelor pas cu pas (m.e.p.p)
Motoarele pas cu pas sunt motoare sincrone modificate prevazute cu un numar de infasurari de comanda alimentate cu un sistem m fazat de impulsuri de tensiune dreptunghiulara, care aplicate fazelor motorului determina o repartitie discreta a campului magnetic in intrefierul masinii si, ca urmare, miscarea rotorului consta in deplasari unghiulare elementare successive de marime determinata constructiv si dependent de modul de comanda.
Spre deosebire de motoarele sincrone de curent alternativ, motoarele pas cu pas intra in sincronism fara alunecare, iar oprirea se realizeaza fara iesire din sincronism, permitand porniri bruste, opriri si reversari fara pierderi de pasi.
Infasurarile de comanda ale m.e.p.p pot fi alimentate separat sau in grupuri de diferite combinatii rezultand divizarea electrica a pasului normal.
M.e.p.p. se clasifica in functie de constructia circuitului magnetic si de numarul infasurarilor de comanda. Se deosebesc doua tipuri de baza:
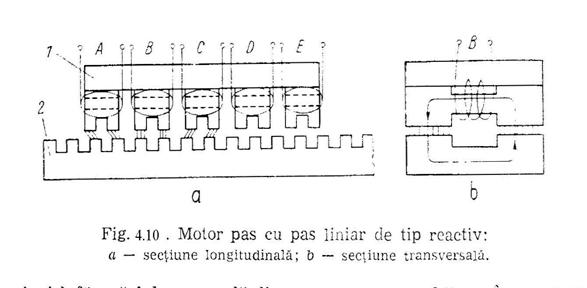
- m.e.p.p de tip reactiv, cu rotorul format numai din jug confectionat din tole
- m.e.p.p. de tip activ, cu rotorul format din jug plus magneti permanenti sau electromagneti
M.e.p.p. de tip reactiv au rotorul executat sub forma unui cilindru feromagnetic dintat cu un numar mare de dinti (poli), astfel ca aceste motoare realizeaza pasi unghiulari foarte mici (pana la 1o) ceea ce asigura o precizie absoluta de pas ridicata. In schimb, chiar la o frecventa de comanda ele realizeaza o turatie scazuta, putand fi utilizate fara reductoare.
M.e.p.p de tip activ au in componenta rotorului magneti permanenti sau electromagneti alimentati prin inele colectoare, motiv pentru care ele pot fi utilizate numai pentru pasi mai mari, realizand deci turatii mai mari.
Cele doua tipuri de baza de mai sus pot fi clasificate la randul lor in functie de modul de realizare al fazelor, in:
motoare polifazate prevazute cu un singur stator, avand mai multi poli, pe care sunt amplasate cele m infasurari de comanda
motoare polistatorice avand m statoare cu un numar de poli z, pe fiecare stator avand o singura infasurare de comanda.
Pentru toate tipurile de m.e.p.p. principiul de functionare este acelasi, motiv pentru care in continuare vor fi prezentate motoarele polistatorice cele mai raspandite.
2.Principiul de functionare al m.e.p.p.
Pentru explicarea functionarii m.e.p.p. se considera motorul cu trei statoare (m=3) reprezentat in figura 1.
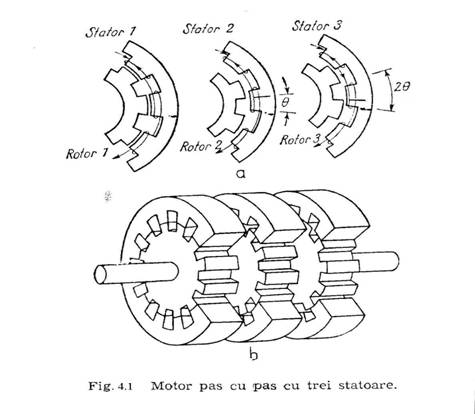
Fiecare stator are un numar de poli (dinti) z si cate o infasurare de comanda care alimentata in curent continuu asigura la stator o succesiune de poli magnetici N-S-N. Cele trei statoare sunt dispuse coaxial cu polii pe aceeasi generatoare.
Pasul unghiular polar ![]() se calculeza cu
relatia :
se calculeza cu
relatia : ![]()
Cele
trei rotoare, executate din pachete de tole, au pe circumferinta
acelasi numar de poli z, dar decalati unghiular de la un rotor
la altul cu unghiul: ![]()
Prin alimentarea unei infasurari statorice la o tensiune continua, polii rotorului respectiv se vor aseza in dreptul polilor statorului (reductanta minima).
In
figura 1 este alimentata faza 1. Prin intreruperea alimentarii
infasurarii 1 si alimentarea infasurarii
statorice 2, rotorul se va roti cu unghiul ![]() ; alimentand
infasurarea a treia rotorul se va roti din nou cu unghiul
; alimentand
infasurarea a treia rotorul se va roti din nou cu unghiul ![]() , s.a.m.d. Inversand ordinea de alimentare a
statoarelor, rotorul se va roti in sens invers cu acelasi unghi
, s.a.m.d. Inversand ordinea de alimentare a
statoarelor, rotorul se va roti in sens invers cu acelasi unghi ![]() pentru fiecare impuls
de comanda.
pentru fiecare impuls
de comanda.
|
Asadar, pasul unghiular motor este : ![]()
Pentru
z=50 si m=3, rezulta: ![]() ,
,
iar
pentru m=4 se obtine: ![]()
Prin
urmare, alimentand infasurarile statorice dupa schema de
comanda: 1-2-3-1-2-3-1, s.a.m.d., rotorul se va roti spre dreapta cu pasul ![]() , iar pentru schema de comanda: 1-3-2-1-3-2,
s.a.m.d., rotorul se va roti spre
stanga cu acelasi pas.
, iar pentru schema de comanda: 1-3-2-1-3-2,
s.a.m.d., rotorul se va roti spre
stanga cu acelasi pas.
Unghiul ![]() reprezinta pasul normal (natural) al m.e.p.p.
reprezinta pasul normal (natural) al m.e.p.p.
Utilizand
alte scheme de comanda a fazelor motorului putem realiza divizarea electrica a pasului
acestuia, fiind deci posibila realizarea unor pasi unghiulari mai
mici. De exemplu, pentru comanda dupa schema: 1-1+2-2-2+3-3, s.a.m.d.
se realizeaza injumatatirea pasului ![]() .
.
3.Echipamente de comanda a m.e.p.p.
Din cele prezentate anterior , rezulta ca comanda m.e.p.p. se realizeaza prin impulsuri dreptunghiulare care determina alimentarea statoarelor conform unei anumite scheme de comanda. In acest scop m.e.p.p. sunt insotite de echipamente de comanda si actionare specifice avand schema bloc reprezentata in figura 2 (pentru motorul cu m=3), in care:
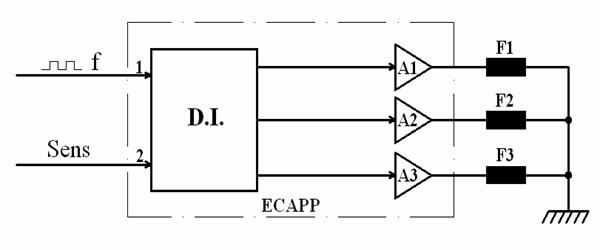
Fig. 2
D.I. distribuitor de impulsuri, pentru realizarea schemei de comanda, avand doua intrari:
1- de frecventa
2- comanda sens
A1;A2;A3 amplificatoare de putere pe faze, pentru alimentarea infasurarilor motorului, cu sau fara fortarea pasirii
F1;F2;F3 infasurarile statorice (fazele) m.e.p.p., parte integranta din motor
In figura, D.I. impreuna cu A1,A2,A3 alcatuiesc echipamentul de comanda si actionare (ECAPP) specific motorului.
Caracteristicile m.e.p.p
Principalele caracteristici ale m.e.p.p. care servesc la alegerea acestora sunt:
-pasul unghiular ![]() , a carui marime de depinde numarul perechilor
de poli z si de numarul de faze m; precizia pasului este
determinata de precizia geometrica de executie si de
simetria circuitului magnetic, erorile de pas compensandu-se insa
dupa o rotatie completa.
, a carui marime de depinde numarul perechilor
de poli z si de numarul de faze m; precizia pasului este
determinata de precizia geometrica de executie si de
simetria circuitului magnetic, erorile de pas compensandu-se insa
dupa o rotatie completa.
-cuplul static sincronizant, care reprezinta variatia cuplului dezvoltat de motor in functie de unghiul de decalaj al axei magnetice a rotorului fata de axa fluxului rezultant statornic si care variaza sinusoidal.
-cuplul critic cvasistationar care reprezinta valoarea maxima a cuplului rezistent la o frecventa data, fara a cauza iesirea din sincronism (pierderea pasului).
Variatia cuplului critic cvasistationar cu frecventa reprezinta caracteristica de sarcina limita reprezentata in figura 3.
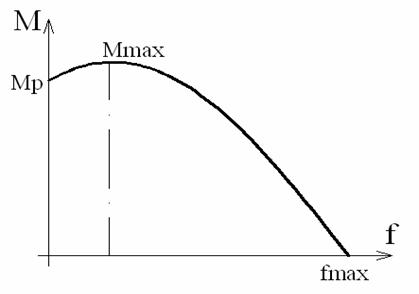
Fig. 3
In mod similar se definesc cuplul critic de pornire, de oprire si de reversare a traseului de rotatie, pentru care se traverseaza curbele caracteristice corespunzatoare. Acoperitoare la alegerea motorului este caracteristica de reversare.
-frecventele limita pentru diferite regimuri de functionare, fara pierdere de pasi ( de ordinul x1KHz÷x10KHz)
Se constata ca momentul de pornire Mp este mai mic decat cel maxim Mmax. De aceea, avand in vedere ca la pornire momentul rezistent dinamic este maxim, se recomanda alimentarea motorului folosind rampa de frecventa, conform figurii , prin aceasta evitandu-se depasirea cuplului maxim sincronizant si deci pierderea de pasi.
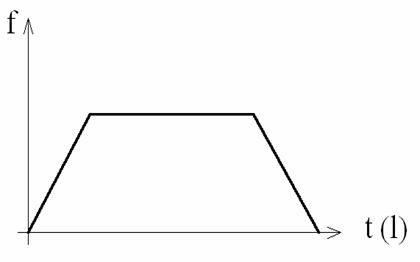
Fig. 4
Sistem de actionare dupa o axa folosind un m.e.p.p.
Pentru a realiza deplasarea sau pozitionarea pe o axa, utilizand un m.e.p.p., se poate folosi urmatoarea structura de comanda (fig 5),
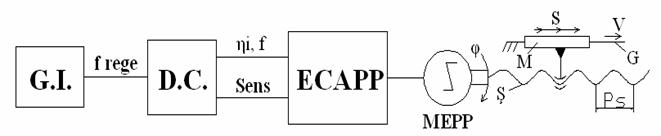
Fig. 5
in care:
G.I. generator de impulsuri dreptunghiulare de frecventa reglabila
D.C. dispozitiv de comanda care trimite catre motor un numar de impulsuri ni la frecventa reglata si genereaza semnalul de comanda a sensului de deplasare
ECAPP echipament specific de comanda si actionare al m.e.p.p.
MEPP motor electric pas cu pas
S surub pentru transformarea miscarii de rotatie in translatie
M masa mobila
G ghidaj
Pentru un numar de impulsuri si unghiul de rotatie φ al motorului pas cu pas se calculeaza cu relatia:
![]() [ 0 ]
[ 0 ]
iar viteza unghiulara cu relatia:
![]() [rad/sec]
[rad/sec]
Pentru deplasarea de translatie a mesei M, pasul miscarii s, lungimea cursei l si viteza v se calculeaza cu relatiile:
![]() [mm]
[mm]
![]() [mm]
[mm]
![]() [mm/s]
[mm/s]
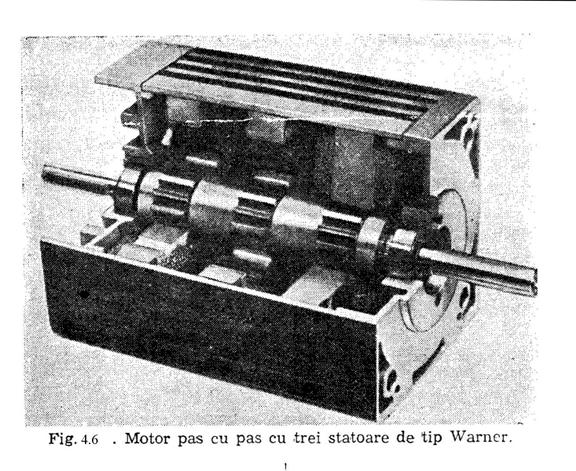
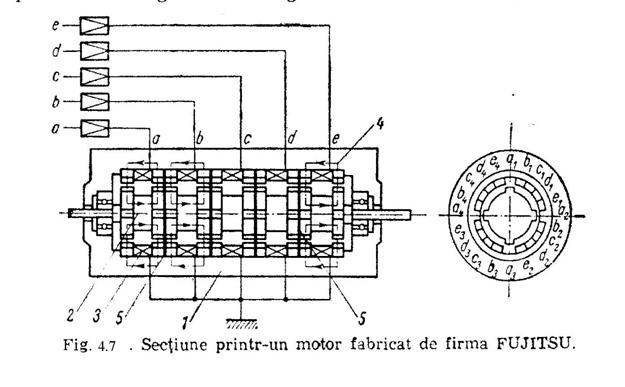
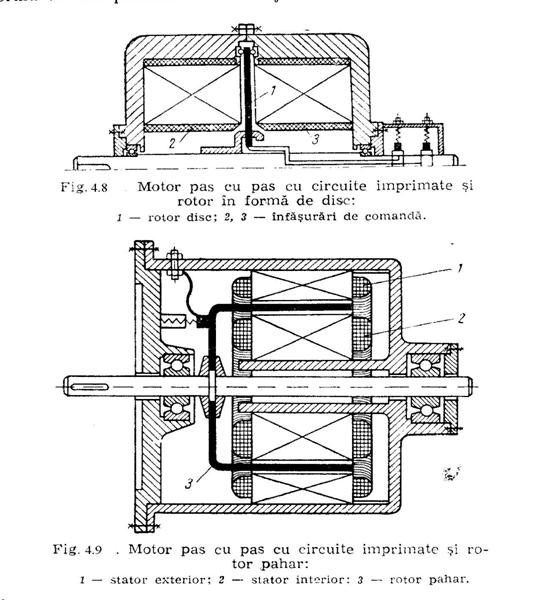
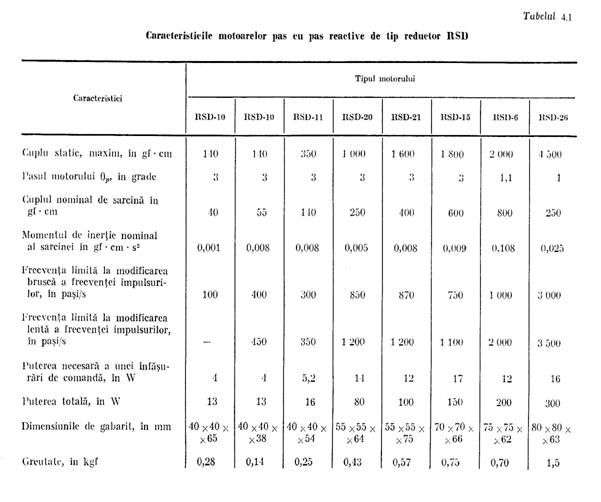
In figurile 6, 7, 8, 9, 10, 11, sunt reprezentate cateva realizari concrete de m.e.p.p. si caracteristicile lor (tab1).
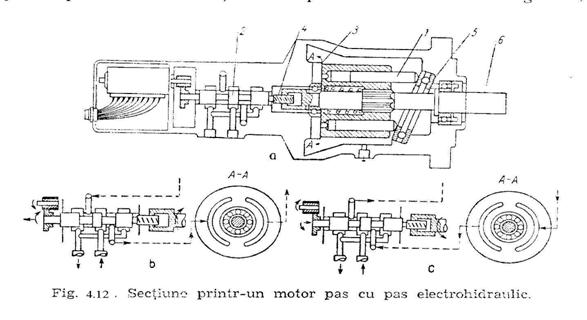
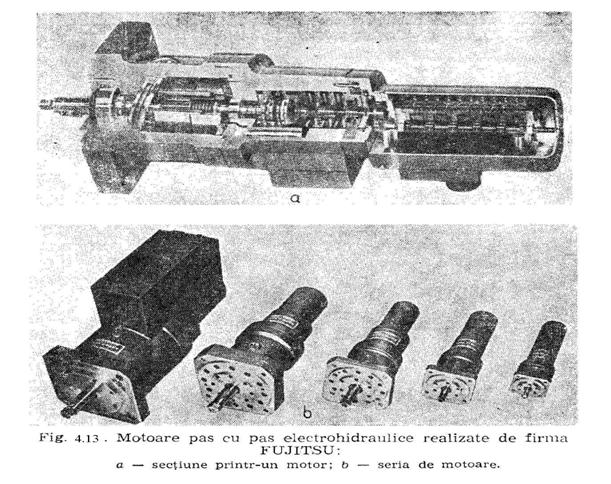
5 Amplificatoare electrohidraulice pas cu pas
Sunt agregate electrohidraulice care imbina avantajele m.e.p.p. (frecvente mari de comanda) cu cele ale motoarelor hidraulice (cupluri mari de actionare). Ele sunt alcatuite dintr-un m.e.p.p. de mica putere care actioneaza un distribuitor hidraulic de urmarire prin care se regleaza debitul de alimentare al unui motor hidraulic rotativ (sau liniar) utilizat ca amplificator de cuplu (forta).
Un exemplu de AEHPP este redat in figura 12 si 13
| Contact |- ia legatura cu noi -| | |
| Adauga document |- pune-ti documente online -| | |
| Termeni & conditii de utilizare |- politica de cookies si de confidentialitate -| | |
| Copyright © |- 2025 - Toate drepturile rezervate -| |
|
|
|||||||
|
|||||||
|
|||||||
Referate pe aceeasi tema | |||||||
|
| |||||||
|
|||||||
|
|
|||||||