|






 |  |

| Aeronautica | Comunicatii | Drept | Informatica | Nutritie | Sociologie |
| Tehnica mecanica |
Auto
|
|
Qdidactic » stiinta & tehnica » tehnica mecanica » auto Telematica rutiera Studiu de caz |
Telematica rutiera Studiu de caz
Telematica rutiera Studiu de caz
Introducere
Pretul platit in Europa (Elvetia este si ea un caz particular) pentru mobilitate este prea mare din cauza numarului excesiv de accidente rutiere. In septembrie 2001, Comisia Europeana a prezentat Carta Alba a politicii transportului in Europa pentru 2010, iar in 2002 au fost lansate, odata cu proiectul VESIPO, noile principii directoare federale elvetiene pentru siguranta in trafic. Ambele initiative au fixat o tinta ambitioasa pentru reducerea accidentelor rutiere grave pana in 2010.
Pana in acest moment, autoritatile publice si industria automobilistica au fost antrenate in imbunatatirea sigurantei rutiere prin prevenirea accidentelor si reducerea avariilor. Majoritatea masurilor de prevenire a accidentelor s-au orientat catre sofer, in timp ce modurile de reducere a consecintelor unui accident au fost orientate catre autovehicul si catre infrastructura drumurilor.
Pe piata exista un numar in crestere de vehicule care poseda functii de control, siguranta si comfort. Aceste tehnologii isi au locul in noile sisteme numite Intelligent Integrated Road Safety Systems. Folisrea noilor tehnologii nu este suficienta pentru atingerea tintei propuse, chiar daca are o contributie foarte importanta.
Un sistem integrat de siguranta a traficului va folosi tehnologiile de informare a societatii si sitemele inteligente de transport. Aceasta abordare globala privind siguranta va include si interactiunea dintre sofer, vehicul si spatiul drumului. In aceasta zona, imbunatatirea sistemelor de navigatie si acuratetea bazelor de date a hartilor digitale vor oferi un mare potential pentru perfectionari, in special atunci cand sunt combinate cu Advanced Driver Assistance Systems (ADAS).
Pentru implementarea Intelligent Integrated Safety Systems, sectorul public si cel privat ar trebui sa colaboreze pentru definirea unor obiective strategice, legale si economice. Introducerea acestor sisteme de siguranta poate fi bazata numai pe eforturile coordonate ale autoritatilor drumurilor si ale industriei automobilistice.
Necesitatea datelor rutiere
Sistemele de navigatie au devenit un standard al echipamentelor aflate la bordul autovehiculelor. Bazandu-se pe capacitatea de pozitionare a autovehiculului, poate fi implementata pentru sofer informatia bazata pe localizare.
Aceste sisteme pot contribui la siguranta rutiera prin informarea soferului despre probleme legate de siguranta pe un anumit sector de drum. Implementarea sistemelor de siguranta bazate pe harti necesita anumite harti digitale care sa contina date referitoare la siguranta si geometria si topologia precisa a sectiunilor de drum.
Dezvoltarea viitoare a aplicatiilor ADAS in domeniul sigurantei rutiere va beneficia de baze de date cu harti digitale perfectionate. Caracteristicile hartilor identificate pentru ADAS in proiectul NextMap sunt bazate pe acuratetea geometrica si pe noile atribute si caracteristici ce urmeaza a fi colectate. Figura 1 prezinta evolutia aplicatiilor ITS aflate in interiorul vehiculelor legata de acuratetea sistemelor de navigatie.
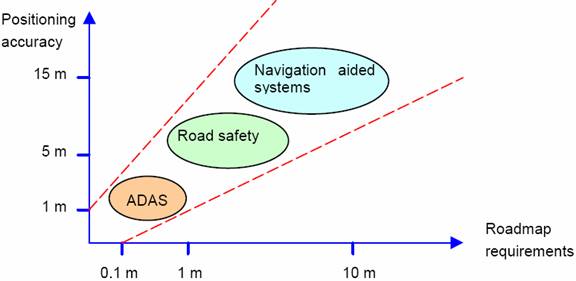
Figura 1. Evolutia aplicatiilor ITS aflate in interiorul autovehiculelor
Laboratorul Geodetic Eng. (TOPO) dezvolta in prezent sisteme integrate pentru pozitionarea persoanelor si a autovehiculelor. Contextul sigurantei rutiere reprezinta un domeniu provocator pentru implementarea tehnologiilor de navigatie pentru pozitionarea precisa a vehiculelor si pentru captarea automata a datelor rutiere.
In prima parte a acestei prezentari ne vom indrepta atentia catre arhitectura sistemelor de navigatie bazate pe senzori integrati pentru functii DAS specifice cum ar fi detectia benzilor.
A doua parte este dedicata evolutiei bazelor de date cu harti digitale cu scopul introducerii de noi atribute si unei geometrii de mare acuratete. A treia parte prezinta noi tehnologii de cartografiere mobila pentru facilitarea colectarii datelor rutiere.
Arhitectura sistemelor de navigatie
In zilele noastre, sistemele de navigatie pot fi regasite in dotarile standard
ale autovehiculelor. De obicei sunt descrise (intr-un mod fals) ca fiind
Sisteme
- senzorii de pozitie
- bazele de date ce contin harti
Blocul de pozitionare reprezinta o combinatie de cativa senzori folositi
pentru calcularea foarte precisa si sigura a pozitiei instantanee a
vehiculului. Cea mai cunoscuta componenta este bineinteles receptorul
|
Deoarece receptarea unor astfel de semnale este dificila, sau chiar imposibila, in zonele urbane si in tunele sunt adaugate semnalul de la un giroscop digital care ajuta la masurarea coeficientilor unghiulari si semnalul unui contor de parcurs care sa masoare distanta parcursa.
Prin integrarea coeficientilor unghiulari si a informatiei despre distanta
parcursa, poate fi calculata o pozitie locala.Aceasta tehnica se numeste punct
estimat (dead reckoning - DR). Pentru a obtine in permanenta informatii
sigure legate de pozitionare, sunt integrate masuratorile
A doua componenta a sistemului de navigatie este harta digitala, o baza de date geografice, care descrie reteaua de drumuri. Contine atat date geometrice cat si atributive. Pentru punerea in concordanta a continutului si formatului acestor date, marii producatori de sisteme de navigatie si harti digitale au creat un standard ISO, numit GDF Geographic Data File. Acest standard defineste felul in care drumurile trebuiesc descrise pentru a putea fi interpretate corect de catre sistemele de navigatie.
Pentru a putea combina informatia despre calculul pozitiei cu datele provenite din harta digitala, trebuiesc implementati asa-numitii algoritmi map matching. Acestia proiecteaza pozitia calculata a vehiculului catre cea ma probabila pozitie de pe reteaua de drumuri modelata. Acesti algoritmi permit coordonarea unei rute. Cunoscand destinatia si pozitia actuala a unui vehicul, sistemul poate calcula calea cea mai buna pana la destinatie si poate oferi informatii in timpul calatoriei. Cele mai noi modele integreaza mesajele referitoare la perturbarile din trafic raspandite pe RDS-TMC pentru a optimiza calcularea rutei in functie de conditiile de trafic in timp real.
Evolutia sistemelor de navigatie si a bazelor de date despre drumuri
Odata cu cresterea nevoii de siguranta, o mare speranta se regaseste in dezvoltarea noilor tehnologii, un caz particular fiind Advances Driver Assistance Systems (ADAS). Acestea reprezinta sisteme ca Automated Cruise Control, Lanekeeping sau faruri care sunt directionate catre o curba care urmeaza. Sistemele de navigatie reprezinta numai o parte din senzorii ce urmeaza a fi folositi pentru realizarea unor astfel de sisteme, dar vor avea cu siguranta un rol major.
Aplicatiile ADAS necesita o precizie a pozitiei in orice conditii intre 1 si 4 metri si o precizie comparabila a bazelor de date cu harti.
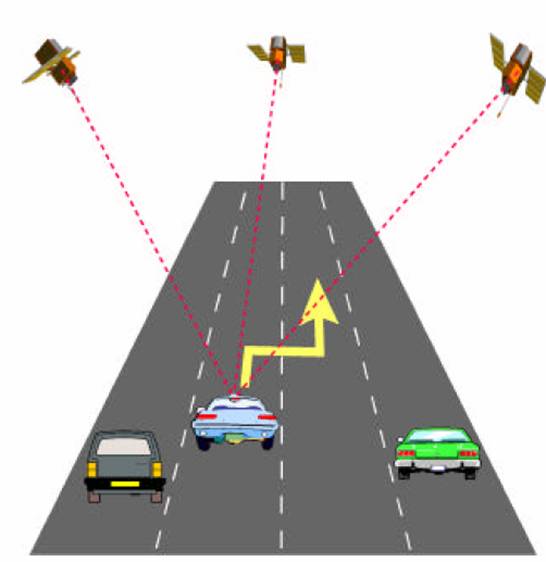
Figura 2. Viitoarele sisteme de navigatie vor putea oferi sfaturi cu privire la schimbarea benzilor de circulatie pentru imbunatatirea sigurantei si fluxului de trafic
Organizatia European ITS Research Organisation, ERTICO, a realizat un proiect despre necesitatile unot viitoare harti folosite in aplicatiile ADAS. Concluziile acestui proiect, numit NextMap, vor fi prezentate intr-un catalog si vor reprezenta imbunatatirile ce ar trebui aduse si propunerea unei extensii a standardului ISO-GDF 4.0 referitor la aplicatiile ITS din interiorul unui vehicul.
Noi tehnici de achizitie a datelor
O baza de date a drumurilor consta intr-un inventar de caracteristici, topologii si atribute. Majoritatea informatiilor poate fi colectata folosind diverse tehnici de topografie. Pentru culegerea ingormatiilor de tip geo, sunt folositi urmatorii pasi:
- Pozitionarea caracteristicilor intr-un sistem de referinta in spatiu.
Aceasta operatiune de geo-referentiere se bazeaza pe tehnici de ridicare topografica
(
- Construirea topologiei obiectelor( retea de drumuri, noduri, intersectii);
- Captarea de atribute si informatii cum ar fi directia traficului, un indicator, numele unei strazi, etc
Colectarea si gestionarea tuturor geo-informatiilor si atributelor
specifice acestora intr-o baza de date cu harti necesita o buna coordonare pe
teren a procesului de topografie. Contopirea diveselor informatii (imaginile
vazute de sus,
Conceprul de Mobile Mapping
Sistemele Mobile Mapping (
Un sistem de mobile mapping implica un vehicul echipat cu urmatoarele:
- Un sistem de pozitionare, cum
ar fi un
- Un modul de achizitie de imagini,
compus din una sau mai multe camere CDD pentru inregistrarea imprejurimilor
drumurilor. Modulul este sincronizat ca si timp cu
- Un modul de procesare de date care sa combine pozitionarea datelor si imaginilor pentru obtinerea unei definitii precise si sigure a pozitiei obiectelor in cauza.
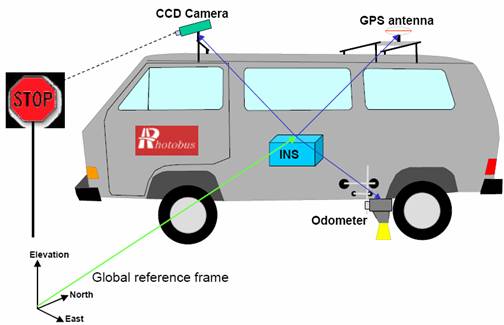
Figura 3. Arhitectura unui sistem mobile mapping
Dezvoltarea
unui
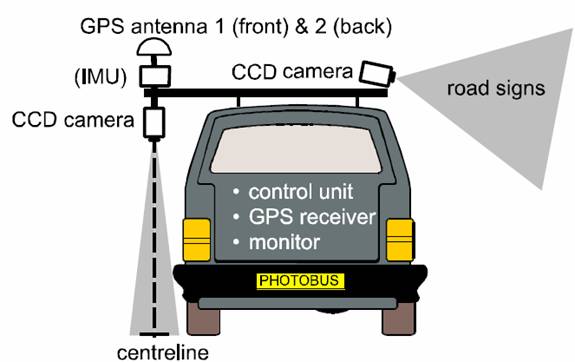
Photobus este un sistem mobile mapping folosit pentru managementul bazelor de date despre drumuri. Sunt montate cateva dispozitive pe un vehicul terestru mobil care realizeaza o topografiere automata a caracteristicilor specifice drumurilor cum ar fi axa centrala, marcajele si inficatoarele, la o viteza de 100 km/ora.
Aceste dispozitive includ receptoare
Global Positioning System (
Geometria drumurilor
Photobus extrage geometria drumului folosind o vedere monoscopica de la o camera orientata vertical. Aceasta setare aduce avantaje importante pentru camerele orientate in fata si pentru caracteristicile de extragere stereoscopica, deoarece:
- permite implicarea camerelor digitale cu rezolutie, calitate optica si stabilitate mai mici;
- reduce complexitatea calibrarii;
- imbunatateste vizibilitatea tintelor atunci cand traficul este aglomerat;
- permite extragerea automata si sigura a caracteristicilor in timp real;
- reduce costurile pastrand precizia optica la nivel de cm.
Rezultatul combinarii dintre datele obtinute de sistemele de navigatie si imagini este un set de puncte 3D. Insiruirea acestor puncte descrie o curba spatiala care modeleaza centrul drumului. Rezultatul este folosit ca si model matematic al drumului si este compatibil cu majoritatea modelelor CAD (Computer Assited Design).
O reprezentare topologica corecta a drumului si a preciziei geometrice sunt
esentiale pentru implementarea in interiorul autovehiculelor a noilor
tehnologii
| Contact |- ia legatura cu noi -| | |
| Adauga document |- pune-ti documente online -| | |
| Termeni & conditii de utilizare |- politica de cookies si de confidentialitate -| | |
| Copyright © |- 2025 - Toate drepturile rezervate -| |
|
|
|||
|
|||
|
|||
Referate pe aceeasi tema | |||
|
| |||
|
|||
|
|
|||